

- Introduction
- Controllers
- Feedback
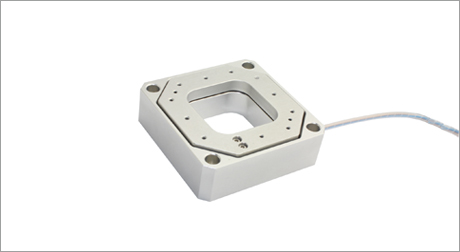
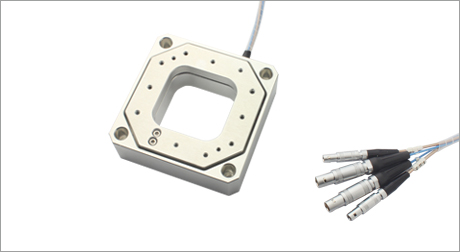
P12A.XY is XY axes piezo scanner with aperture in the center of scanner. The internal frictionless flexible hinge guiding mechanism uses finite element simulation to optimize the structure and has high guiding precision and large stiffness, large load and other characteristics, the scanner could be equipped with high-performance sensors for closed feedback, achieving repeatability positioning accuracy of 0.04% of full stroke.
Features

|
|
|
|
|

|
Appearance 
|
Moving-part 
|
Amplified-driving 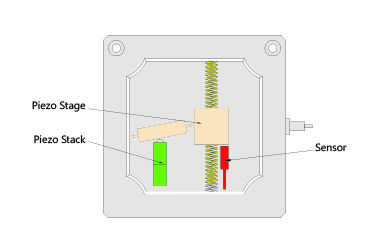
|
|
Small Size Large Displacement
P12A.XY is very compact and can be displaced up to 100μm. Unique parallel kinematic design enables the scanner to achieve high-speed precision motion of XY axes. |
Freqency VS Load Curve 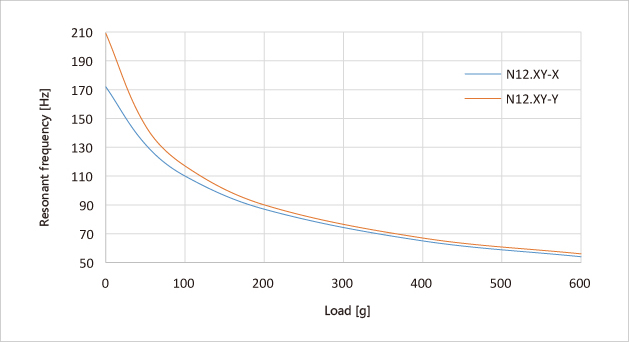
|
High Positioning Accuracy P12A is equipped with high-resolution sensor, which detects the position in real time and feeds back to piezo controller. The controller adjusts the voltage correction displacement through the PID algorithm to achieve high-precision positioning. 
|
Applications
|
|
|
|
|
P12A series

| Technical data | |||
|
Models |
S-Closed loop K-Open loop |
P12A.XY100S P12A.XY100K |
Units |
|
Active axes |
X、Y |
|
|
|
Drive control |
2 driving channels 2 sensing channels |
|
|
|
Travel range(0~120V) |
80/axis |
μm±10% |
|
|
Max.travel range(0~150V) |
100/axis |
μm±10% |
|
|
Integrated sensor |
SGS/- |
|
|
|
Aperture |
45×45 |
mm |
|
|
Closed/open loop resolution |
3/1 |
nm |
|
|
Closed-loop linearity |
0.1/- |
%F.S |
|
|
Repeatability |
0.05/- |
%F.S |
|
|
Pitch/Yaw/Roll |
<15 |
μrad |
|
|
Push/pull force capacity |
25/8 |
N |
|
|
Stiffness |
X0.25/Y0.3 |
N/μm±20% |
|
|
Unloaded resonant frequency |
X170/Y200 |
Hz±20% |
|
|
Closed/open-loop unloaded Step time |
15/0.8 |
ms±20% |
|
|
Load capacity |
Horizontal |
0.6 |
kg |
|
Vertical |
0.03 | ||
|
Inverted |
0.6 | ||
|
Electrical capacitance |
3.6/axis |
μF±20% |
|
|
Material |
Steel, Aluminum |
|
|
|
Mass |
290 |
g±5% |
|
Note: Max driving voltage could be -20V~150V, Recommended voltage 0~120V for long-term operation to extend lifetime. Technical data are measured by CoreMorrow E00/E01 series piezo controller.
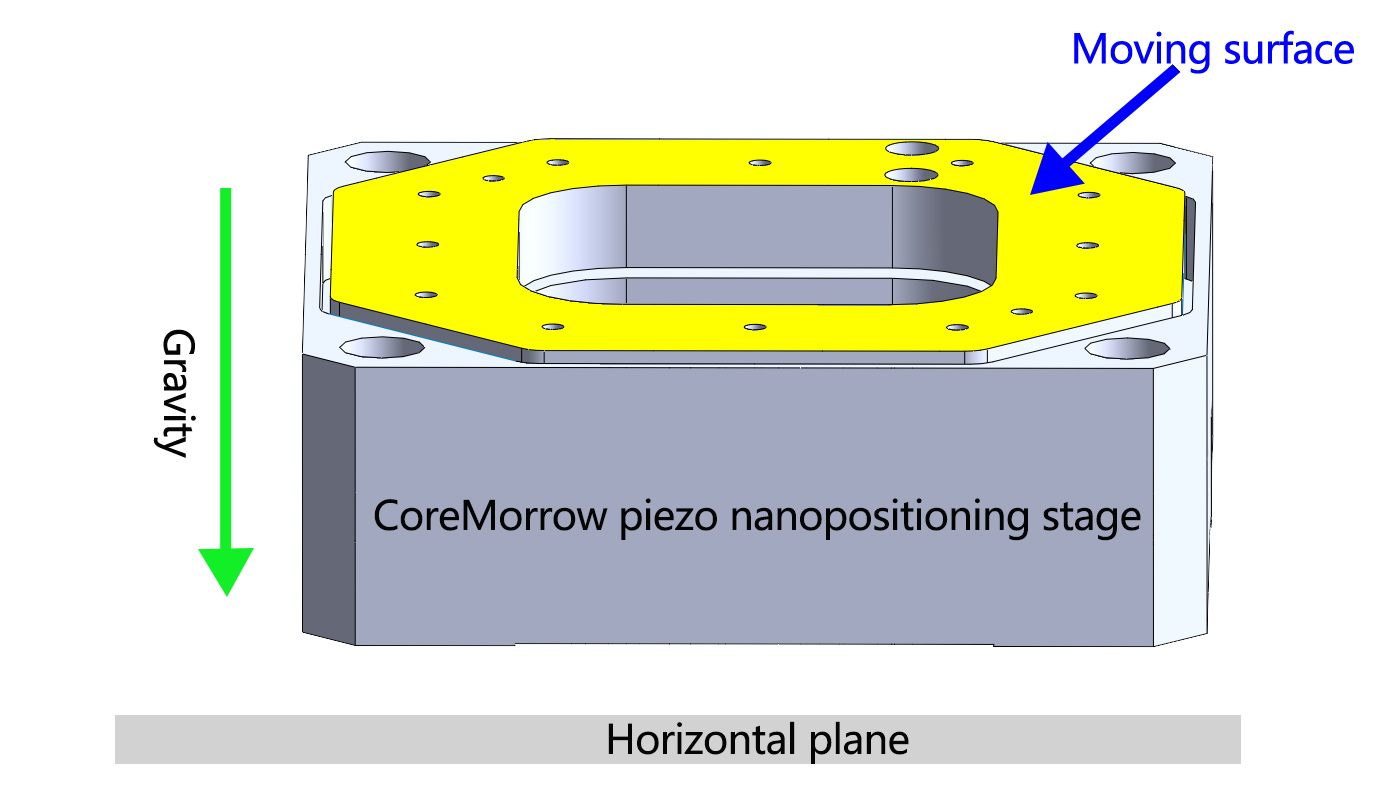
| Mounting Method |
Horizontal Mounting |
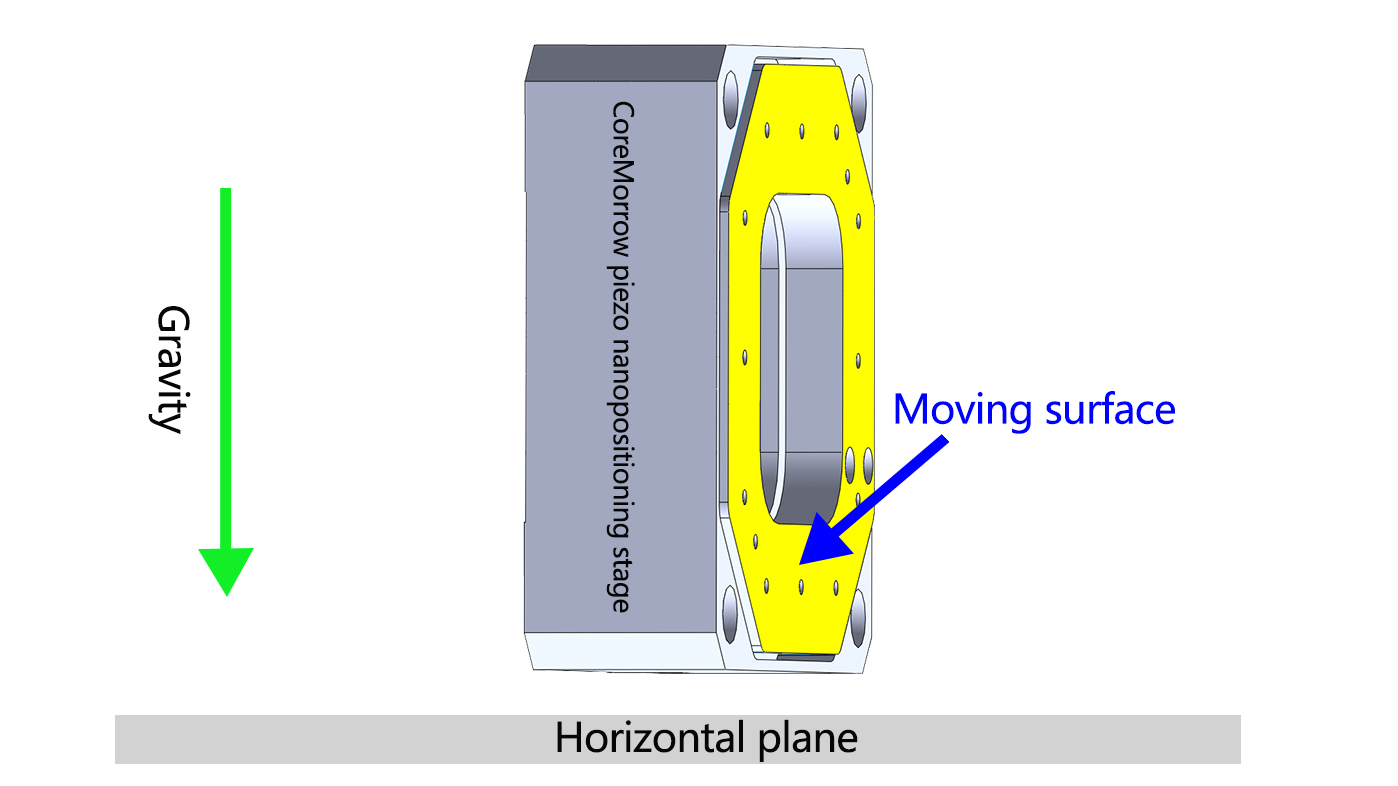
Vertical Mounting |
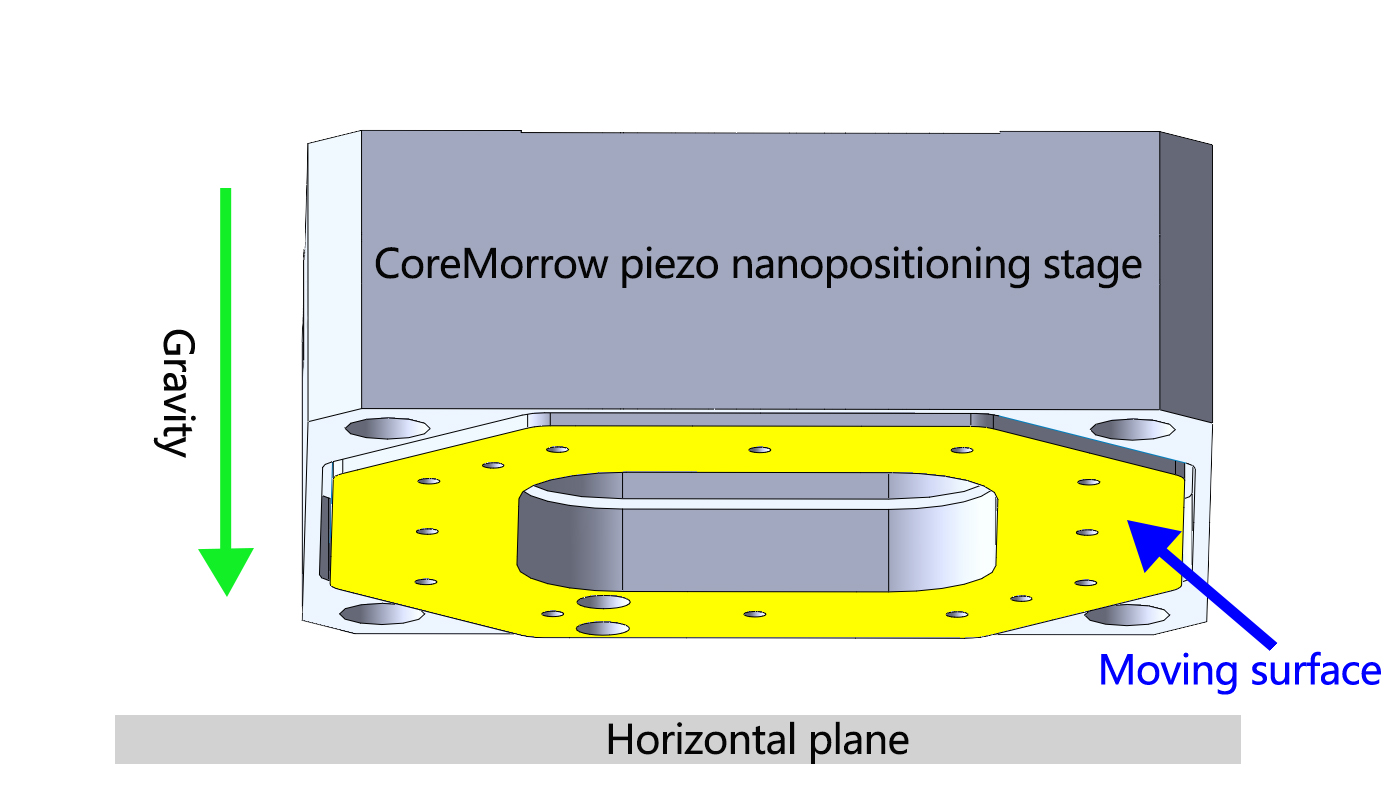
Inverted Mounting |
| Definition |
Place the PZT platform horizontally for installation, with the moving surface located above the PZT platform and parallel to the horizontal plane.
PS: Default direction for carrying capacity in the parameter table
|
Place and install the PZT platform vertically, with the moving surface parallel to the direction of gravity
|
Place the PZT platform horizontally, but the moving surface is located below the PZT platform |
| Diagram |
 |
 |
 |
| Note |
When the mounting method is selected as vertical mounting, pay attention to the outlet port |
||







Sweep, get the latest information on core tomorrow
Address:1F, Building I2, No.191 Xuefu Road, Nangang District, Harbin, China
Tel:0451-86268790
Piezo · Nano · Motion
