

- Introduction
- Notes
- Controllers
- Feedback
Fast Tool Positioning Stage is designed for ultra-precision turning. It has the characteristics of high frequency, large stiffness, high precision to drive the stage to quickly feed in the direction of motion, achieving precision machining of complex surface parts or structures.
Characteristics

|
|
|
|
|
|
|
|
|
|

|
Dust and Droplet Proof On Request
P92 is dust- and drip-resistant, allowing it to work in humid environments. The stage body material is made of stainless steel to ensure the stability during processing, the structure is stable and reliable, and the machining accuracy is not affected by the vibration. |
Large Blocking Force Blocking force of piezo actuator in fast tool positioning stage is several times of other piezo actuator in piezo stage. 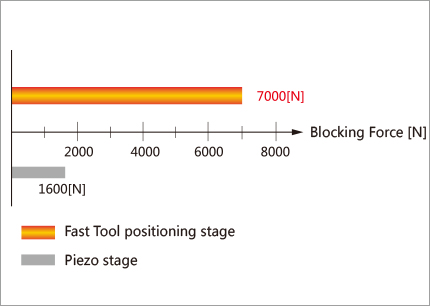
|
Closed loop Resolution Unlike vibration machining, the tool position could be feedback controlled by sensor for nanometer resolution. 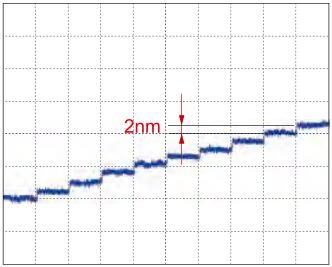
|
|
Sensor P92 could be optionally equipped with SGS sensor, LVDT sensor or CAP sensor to eliminate the hysteresis and creep of piezo actuator, input control voltage is linear with output displacement. 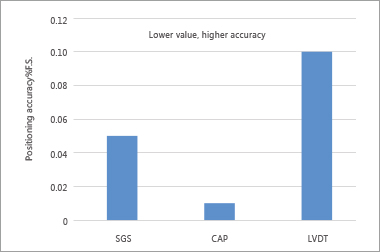
|
Closed Loop Curve 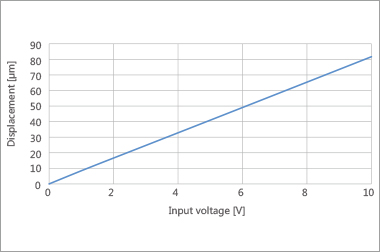
|
Open Loop Curve 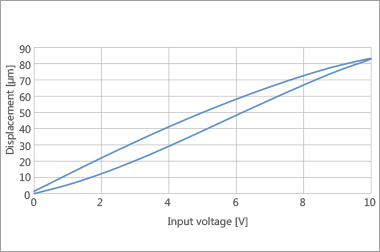
|
|
Step Time 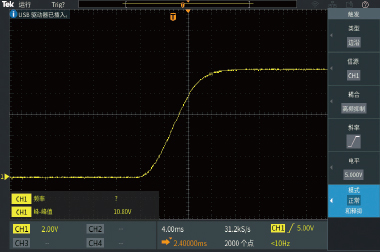
|
Applications
|
|
|
|
|
| Technical data | |||||
|
Models |
C/L-Closed loop K-Open loop |
P92.X70C |
P92.X70L |
P92.X70K |
Units |
|
Active axes |
X | X | X |
|
|
|
Drive control |
1 driving channel 1 sensing channel |
1 driving channel 1 sensing channel |
1 driving channel |
|
|
|
Travel range(0~120V) |
60 |
60 |
60 |
μm±10% |
|
|
Max.travel range(0~150V) |
75 |
75 |
75 |
μm±10% |
|
|
Integrated sensor |
CAP |
LVDT |
- |
|
|
|
Resolution |
2.5 |
10 |
1 |
nm |
|
|
Closed-loop linearity |
0.1 |
0.2 |
- |
%F.S. |
|
|
Repeatability |
0.01 |
0.1 |
- |
%F.S. |
|
|
Pitch/Yaw/Roll |
<15 |
<15 |
<15 |
μrad |
|
|
Push/pull force capacity |
550/240 |
550/240 |
550/240 |
N |
|
|
Stiffness |
8 |
8 |
8 |
N/μm±20% |
|
|
Unloaded resonant frequency |
1.6 |
1.6 |
1.6 |
kHz±20% |
|
|
Unloaded Step time |
10 |
10 |
5 |
ms±20% |
|
|
Closed-loop operating frequency(-3dB) |
110(@500g load) |
110(@500g load) |
110(@500g load) |
Hz±20% |
|
|
Load capacity |
Horizontal |
5 |
5 |
5 |
kg |
|
Vertical |
- | - | - | ||
|
Inverted |
- | - | - | ||
|
lectrical capacitance |
18 |
18 |
18 |
μF±20% |
|
|
Material |
Steel |
Steel |
Steel |
|
|
|
Mass |
3125 |
3125 |
3125 |
g±5% |
|
Note: Max driving voltage could be -20V~150V, Recommended voltage 0~120V for long-term operation to extend lifetime.
Technical data are measured by CoreMorrow E00/E01 series piezo controller.
| Mounting Method |
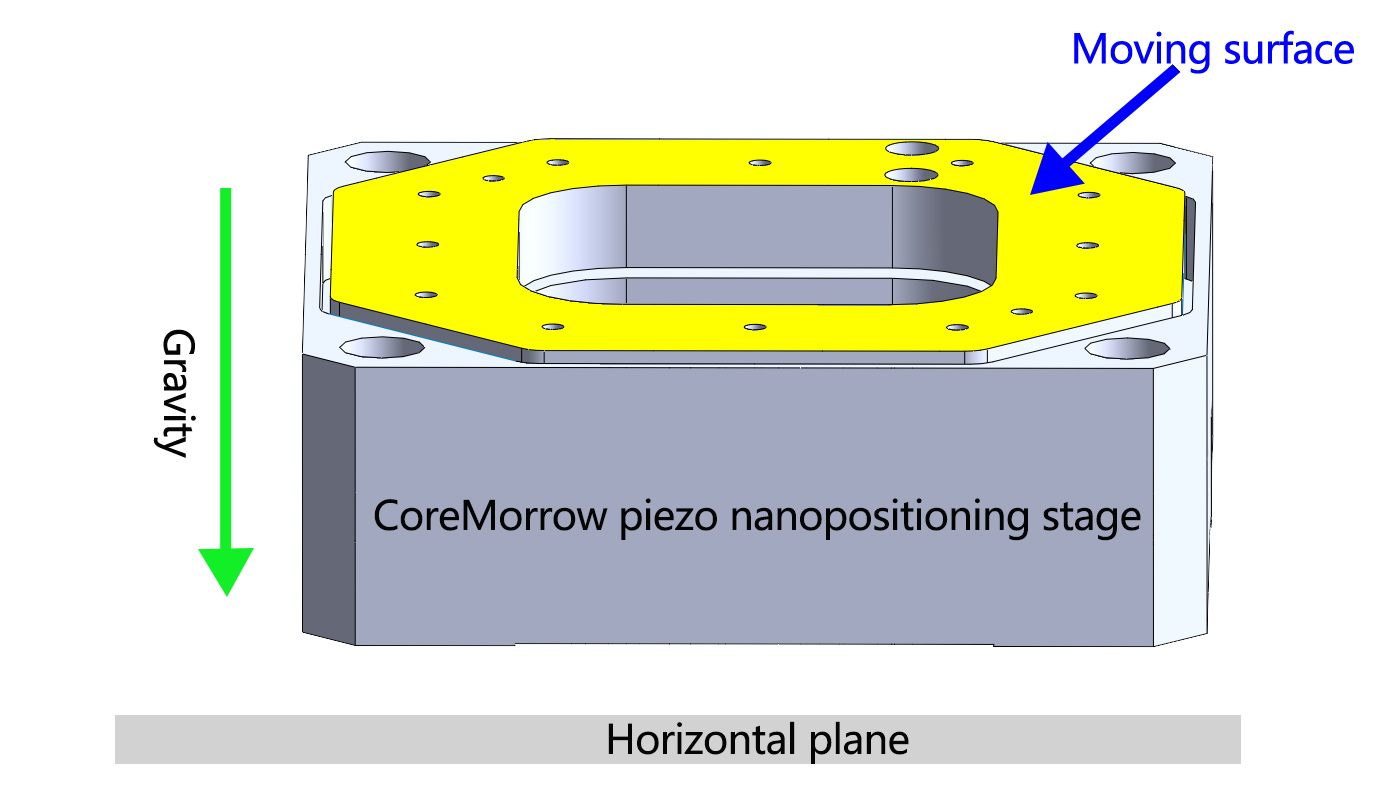
Horizontal Mounting |
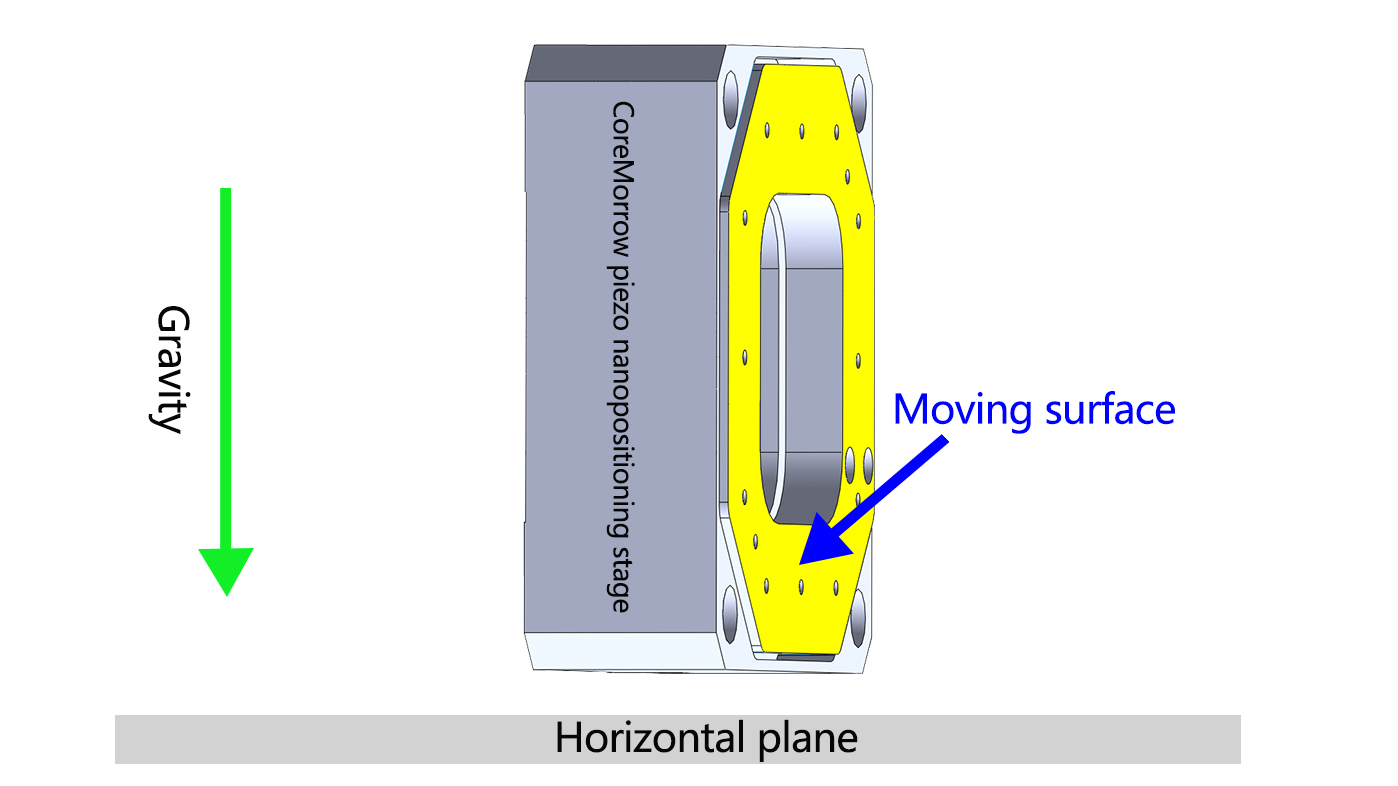
Vertical Mounting |
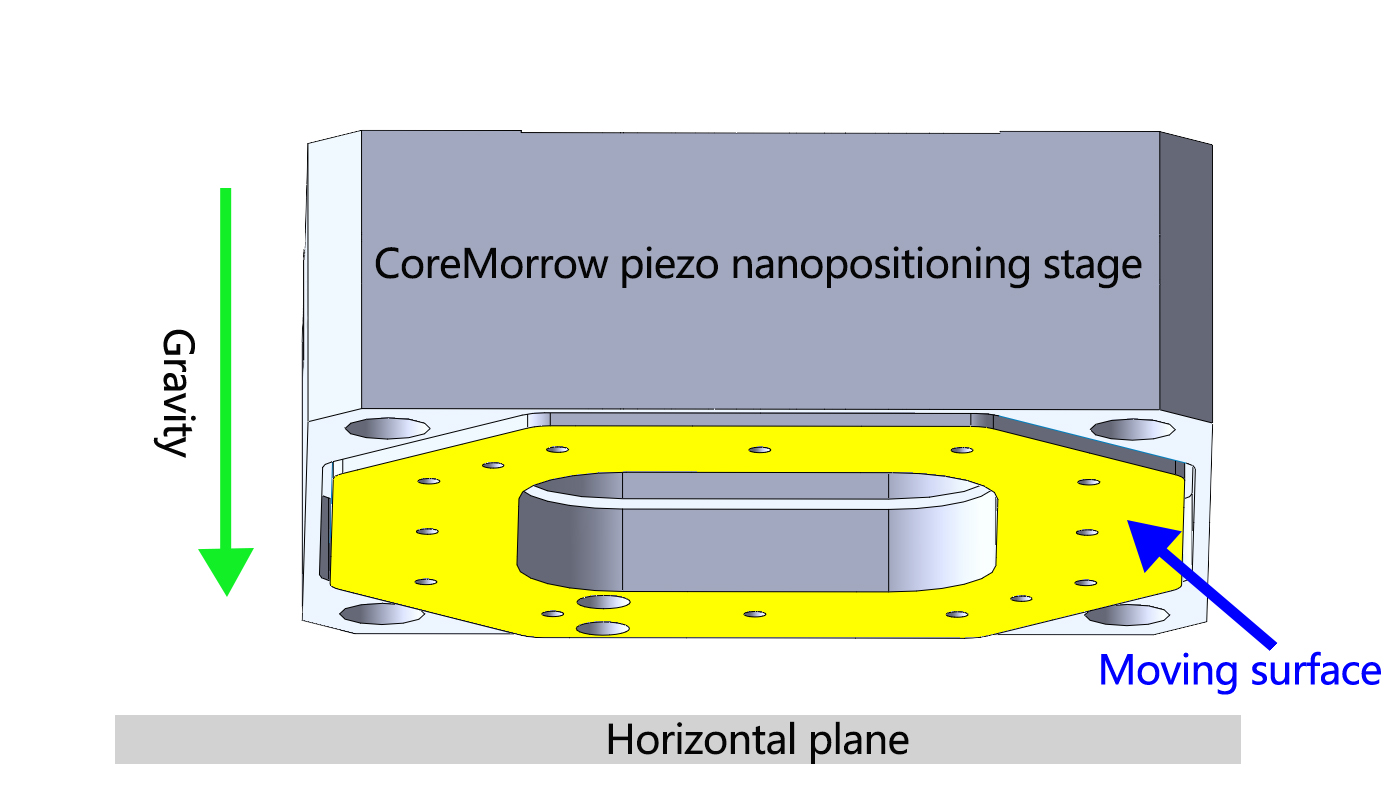
Inverted Mounting |
| Definition |
Place the PZT platform horizontally for installation, with the moving surface located above the PZT platform and parallel to the horizontal plane.
PS: Default direction for carrying capacity in the parameter table
|
Place and install the PZT platform vertically, with the moving surface parallel to the direction of gravity
|
Place the PZT platform horizontally, but the moving surface is located below the PZT platform |
| Diagram |
 |
 |
 |
| Note |
When the mounting method is selected as vertical mounting, pay attention to the outlet port |
||
Recommended Controller
|
|
|
|








Sweep, get the latest information on core tomorrow
Address:1F, Building I2, No.191 Xuefu Road, Nangang District, Harbin, China
Tel:0451-86268790
Piezo · Nano · Motion
