

- Introduction
- Controllers
- Feedback
P13.XY is XY moiton piezo stage. It adopts parallel kinematic mechanism to amplify the design principle. Built-in high-performance piezo actuator with max displacement of 45μm/axis. Open loop or closed loop version is available.
Characteristics

|
|
|
|
|

|
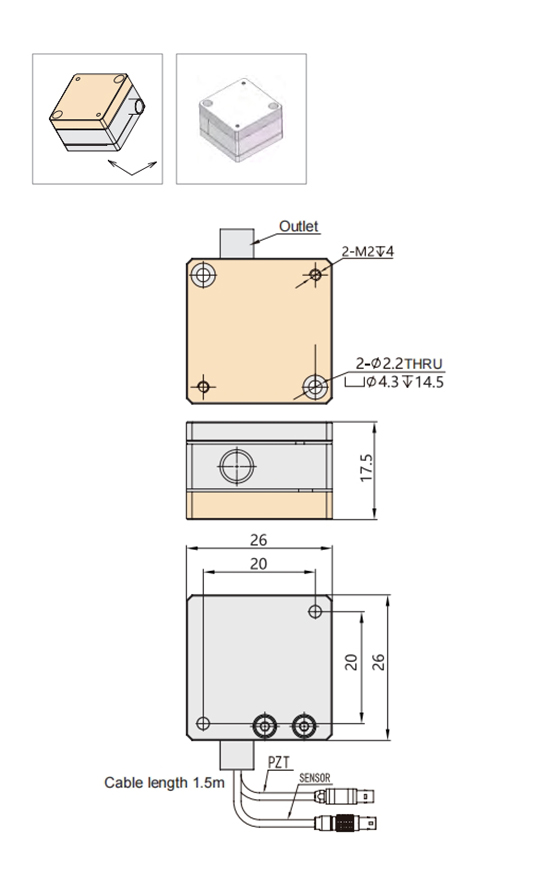
Appearance 
|
Moving-part 
|
Amplified-driving 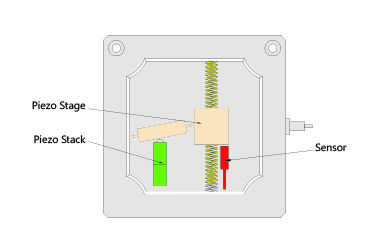
|
|
Ultra-Small Size, High Resolution
Solid-state hinge parallelogram design principle, it has very high resolution and good linearity of motion. |
Sensor 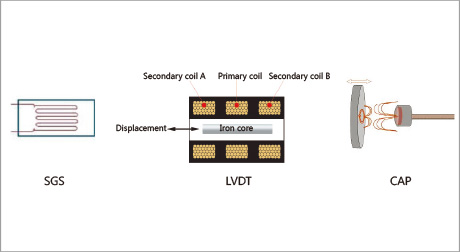
|
Closed Loop Stabilization Time Settling time of the P13.XY50S closed loop version full stroke is ~30ms. 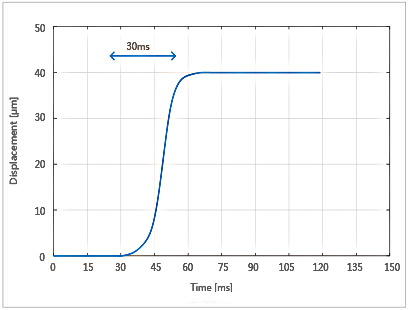
|
|
Freqency VS Load Curve 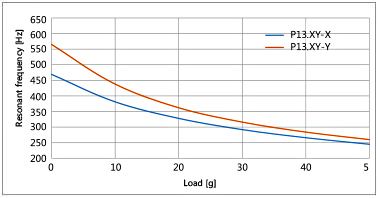
|
Applications
|
|
|
|
|
|
|
|
|
|
| Technical data | |||
|
Models |
S-Closed loop K-Open loop |
P13.XY30S P13.XY30K |
Units |
|
Active axes |
XY |
|
|
|
Drive control |
2 driving channels 2 sensing channels |
|
|
|
Travel range(0~120V) |
36/axis |
μm±10% |
|
|
Max.travel range(0~150V) |
45/axis |
μm±10% |
|
|
Integrated sensor |
SGS/- |
|
|
|
Closed/open loop resolution |
1/0.05 |
nm |
|
|
Closed-loop linearity |
0.2/- |
%F.S. |
|
|
Repeatability |
0.1/- |
%F.S. |
|
|
Pitch/Yaw/Roll |
<30 |
μrad |
|
|
Push/pull force capacity |
5/2 |
N |
|
|
Stiffness |
X0.15/Y0.2 |
N/μm±20% |
|
|
Unloaded resonant frequency |
0.6 |
kHz±20% |
|
|
Closed/open-loop unloaded Step time |
20/3 |
ms±20% |
|
|
Load capacity |
Horizontal |
0.2 |
kg |
|
Vertical |
0.05 or 0.1* | ||
|
Inverted |
0.2 | ||
|
Electrical capacitance |
0.4/axis |
μF±20% |
|
|
Material |
Steel, Aluminum |
|
|
|
Mass |
110 |
g±5% |
|
Note: Max driving voltage could be -20V~150V, Recommended voltage 0~120V for long-term operation to extend lifetime.
Technical data are measured by CoreMorrow E00/E01 series piezo controller.
*When installed vertically, the load capacity depends on the specific installation direction.
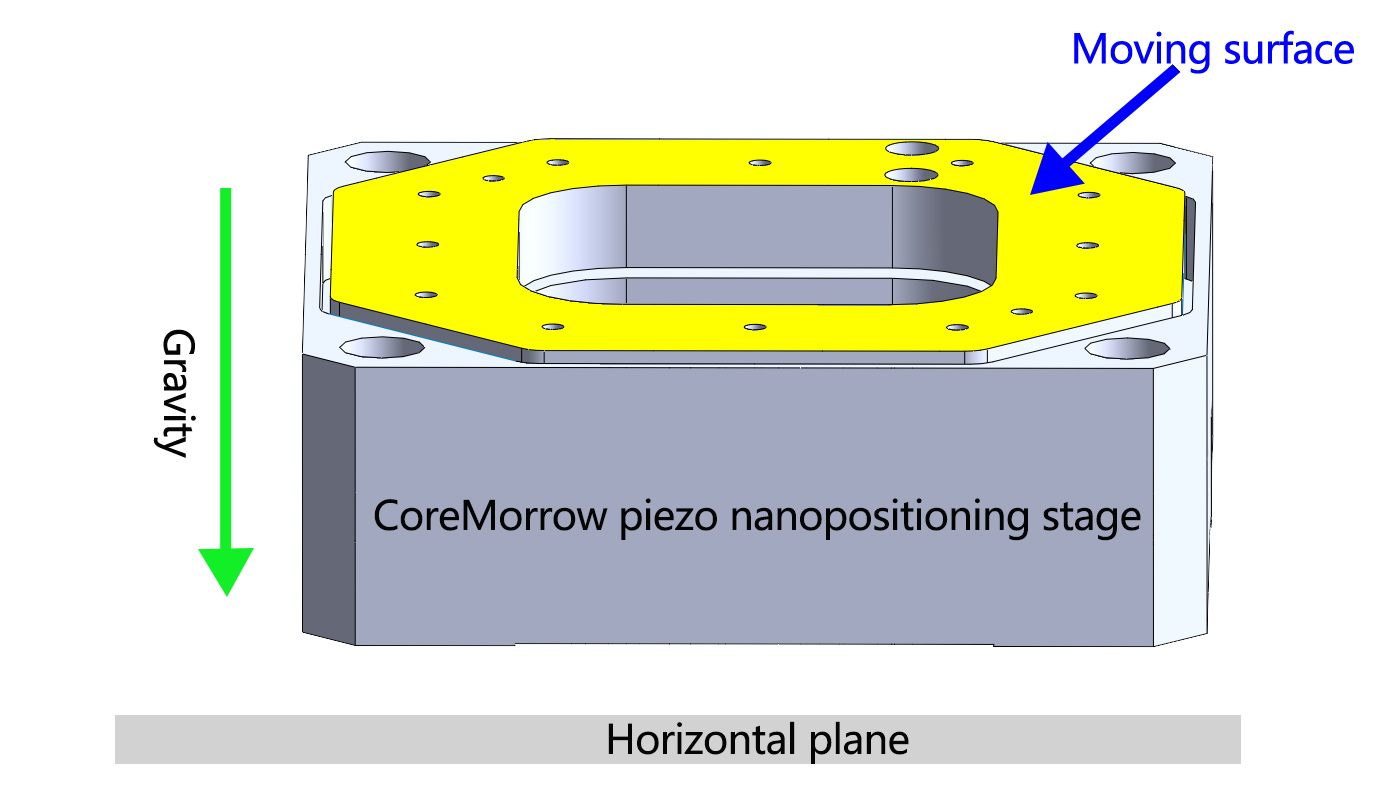
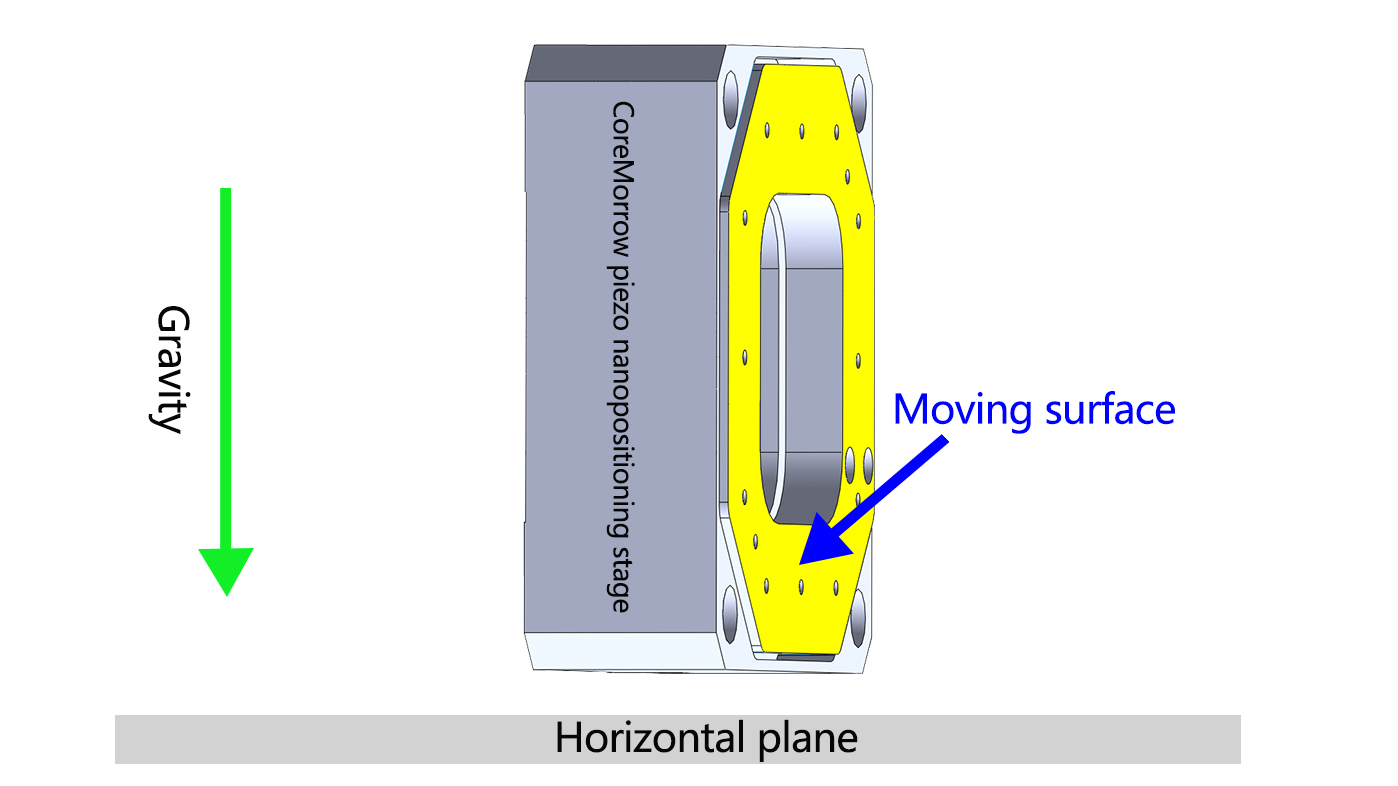
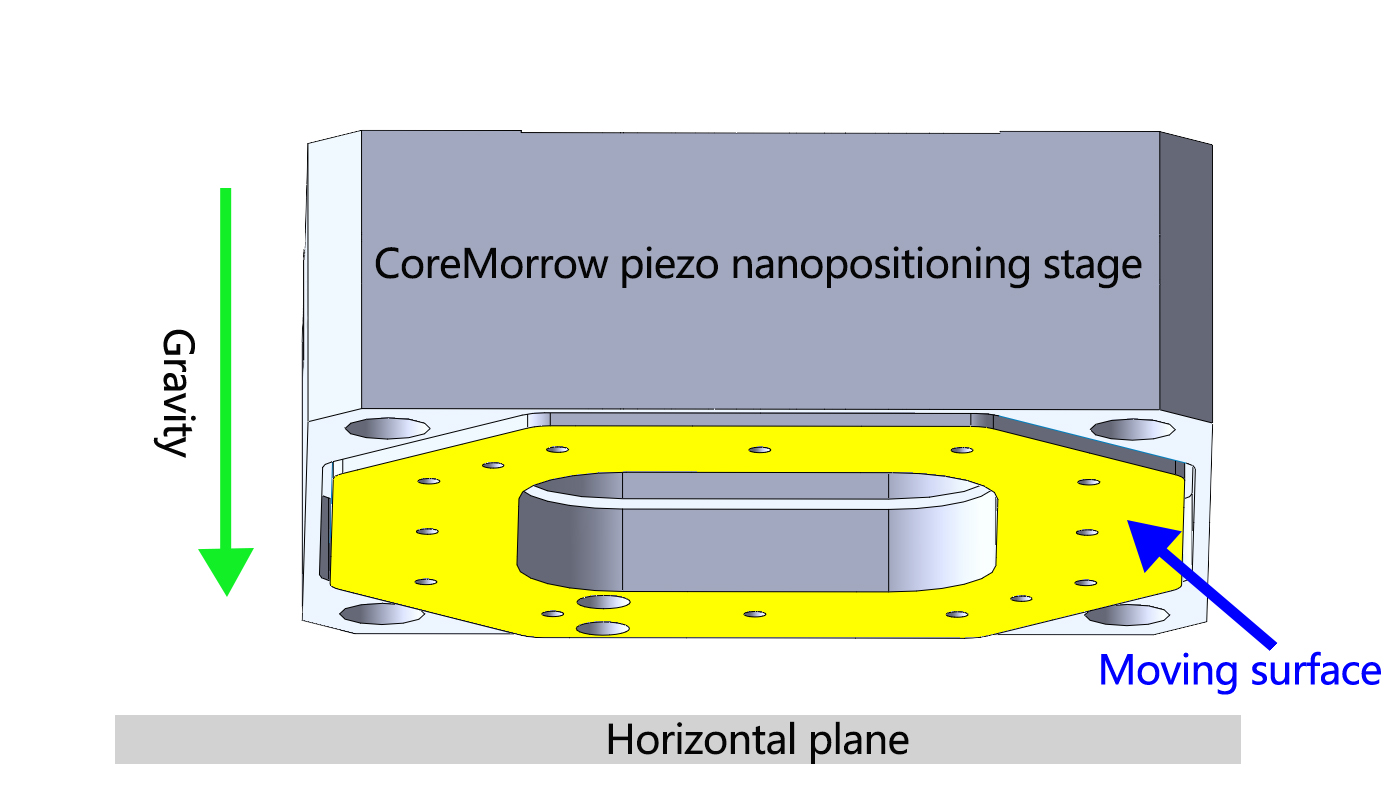
| Mounting Method |
Horizontal Mounting |
Vertical Mounting |
Inverted Mounting |
| Definition |
Place the PZT platform horizontally for installation, with the moving surface located above the PZT platform and parallel to the horizontal plane.
PS: Default direction for carrying capacity in the parameter table
|
Place and install the PZT platform vertically, with the moving surface parallel to the direction of gravity
|
Place the PZT platform horizontally, but the moving surface is located below the PZT platform |
| Diagram |
 |
 |
 |
| Note |
When the mounting method is selected as vertical mounting, pay attention to the outlet port |
||






Sweep, get the latest information on core tomorrow
Address:1F, Building I2, No.191 Xuefu Road, Nangang District, Harbin, China
Tel:0451-86268790
Piezo · Nano · Motion
