

- Introduction
- Feedback
The N56 linear piezo motor adopts piezo micro-drive technology, which uses piezo micro-displacement actuators to achieve high-precision positioning and movement technology. Macro motion linear millimeter-level stroke is achieved after mechanical structure conversion of the microdeformation of piezo actuator under electric field.
Characteristics

|
|
|
|
|
|
|
|
|
|

|
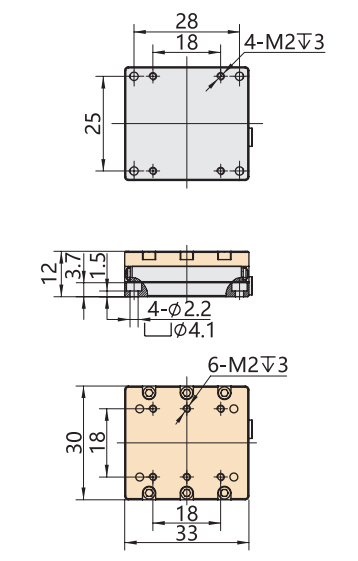
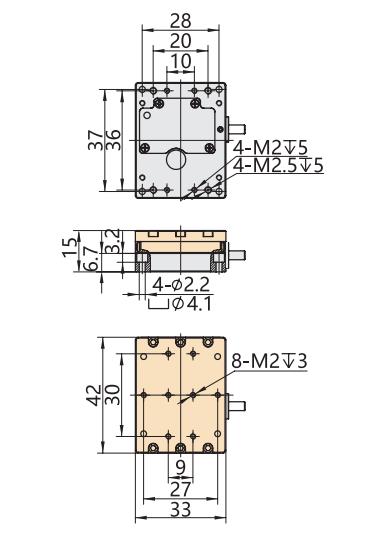
N56.10K linear piezo motor 
|
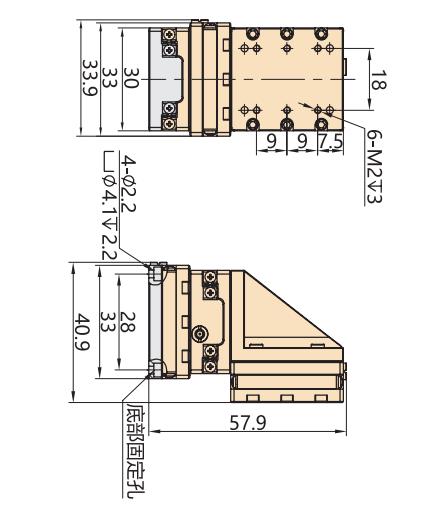
Optional XY version 
|
Optional XY version 
|
Application
|
|
|
|
|
|
|
|
||
Recommended Controller
|
|

| Technical Data | |||||||||
|
Type |
N56.10K |
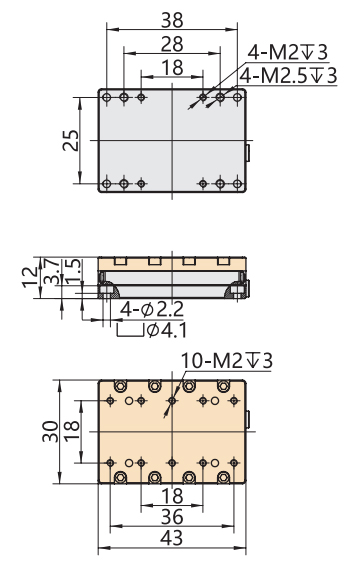
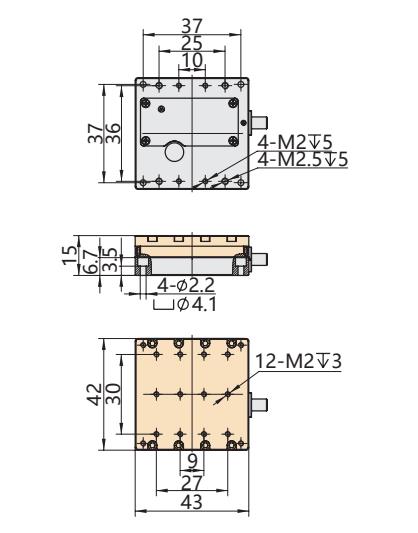
N56.20K |
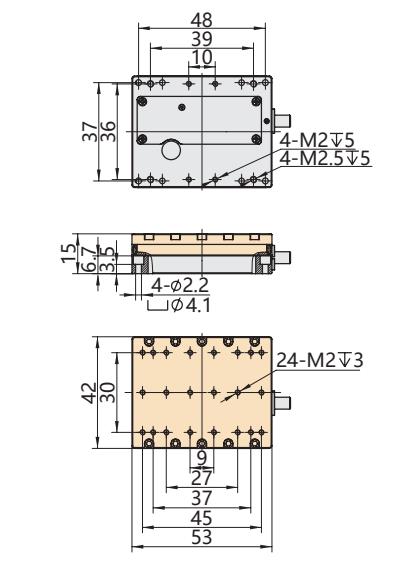
N56.30K |
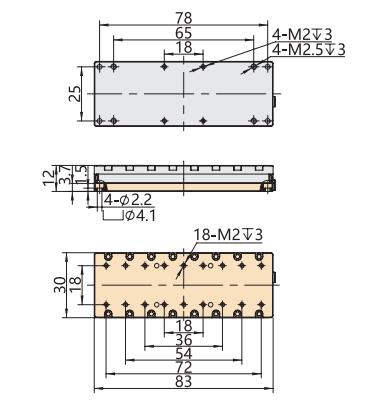
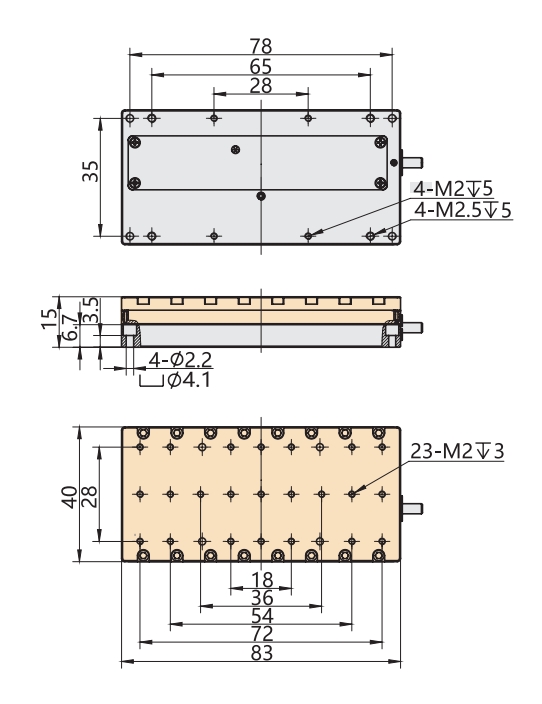
N56.50K |
N56.10E |
N56.20E |
N56.30E |
N56.50E* |
Units |
|
Active axes |
X |
X |
X |
X |
X |
X |
X |
X |
|
| Integrated sensor | - |
grating sensor |
|||||||
|
Travel range |
10or±5 |
20or±10 |
30or±15 |
50or±25 |
10or±5 |
20or±10 |
30or±15 |
50or±25 |
mm |
|
Speed limit |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
mm/s±20% |
|
Resolution |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
nm |
|
Max force |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
3 |
N |
|
Repeatability |
- |
- |
- |
- |
0.1 |
0.12 |
0.15 |
0.2 |
μm±20% |
|
Max force |
- |
- |
- |
- |
3 |
3 |
3 |
3 |
N |
|
Holding |
4.5 |
4.5 |
4.5 |
4.5 |
4.5 |
4.5 |
4.5 |
4.5 |
N |
|
Max load |
500 |
500 |
500 |
500 |
500 |
500 |
500 |
500 |
g |
|
Max load |
0.1 |
0.1 |
0.1 |
0.1 |
0.1 |
0.1 |
0.1 |
0.1 |
kg |
|
Axial stiffness |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
N/μm±20% |
|
Lateral stiffness |
9 |
9 |
9 |
9 |
9 |
9 |
9 |
9 |
N/μm±20% |
|
Operating |
0~50 |
0~50 |
0~50 |
0~50 |
0~50 |
0~50 |
0~50 |
0~50 |
℃ |
|
Cable length |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
m±10mm |
|
Material |
Al, Steel |
Al, Steel |
Al, Steel |
Al, Steel |
Al, Steel |
Al, Steel |
Al, Steel |
Al, Steel |
|
|
Mass |
40 |
50 |
60 |
82 |
58 |
75 |
85 |
110 |
g±10% |
|
Recommended |
E53.C1K-J(Digital control, USB and serial port |
E53.D1E-J(Digital control, USB and serial port communication) |
|
||||||
*:N56.50E overall dimensions 83x40x15mm

|
|


Sweep, get the latest information on core tomorrow
Address:1F, Building I2, No.191 Xuefu Road, Nangang District, Harbin, China
Tel:0451-86268790
Piezo · Nano · Motion
