

Note:When installed vertically, the load capacity depends on the specific installation direction.
P66.X90 Piezo Nanopositioning Stage (CAP Sensor)Current Location:Product Homepage >> X/Z Piezo Nanopositioner>>P66.X90 Piezo Nanopositioning Stage (CAP Sensor)

- Introduction
- Feedback
P66.X90 is an X-axis piezo nanopositioning stage, with a displacement up to 95μm. Its closed-loop version integrates CAP sensors to detect and feedback the position in real time, with E53.D1C-H piezo controller developed by CoreMorrow, and it can achieve higher precision motion control.
Characteristics

|
|
|
|
|
|
|
|
|
|
|
Recommended Controllers  E53.D1C-H E53.D1C-H
|
| Technical Data | ||||
|
Type |
C-Closed loop
K-Open loop |
P66.X90C |
P66.X90K |
Units |
|
Active axes |
X |
X |
|
|
|
Drive control |
1 driving channel |
1 driving channel |
|
|
|
Nominal travel range(0~120V) |
76 |
76 |
µm±10% |
|
|
Max.travel range(0~150V) |
95 |
95 |
µm±10% |
|
|
Sensor type |
CAP |
- |
|
|
|
Resolution |
3 |
1 |
nm |
|
|
Linearity |
0.021 |
- |
%F.S. |
|
|
Repeatability |
0.005 |
- |
%F.S. |
|
|
Unloaded resonant frequency |
615 |
615 |
Hz±20% |
|
|
Resonant frequency@5kg |
310 |
310 |
Hz±20% |
|
|
Step time@5kg |
8@20μm |
6 |
ms±20% |
|
|
Load capacity |
Horizontal |
10 |
10 |
kg |
|
Vertical |
0.05 or 5* |
0.05 or 5* |
||
|
Inverted |
10 |
10 |
||
|
El. capacitance |
37 |
37 |
μF±20% |
|
| Material | AI | AI |
|
|
|
Mass(Cable included) |
5.7 |
5.7 |
kg±5% |
|
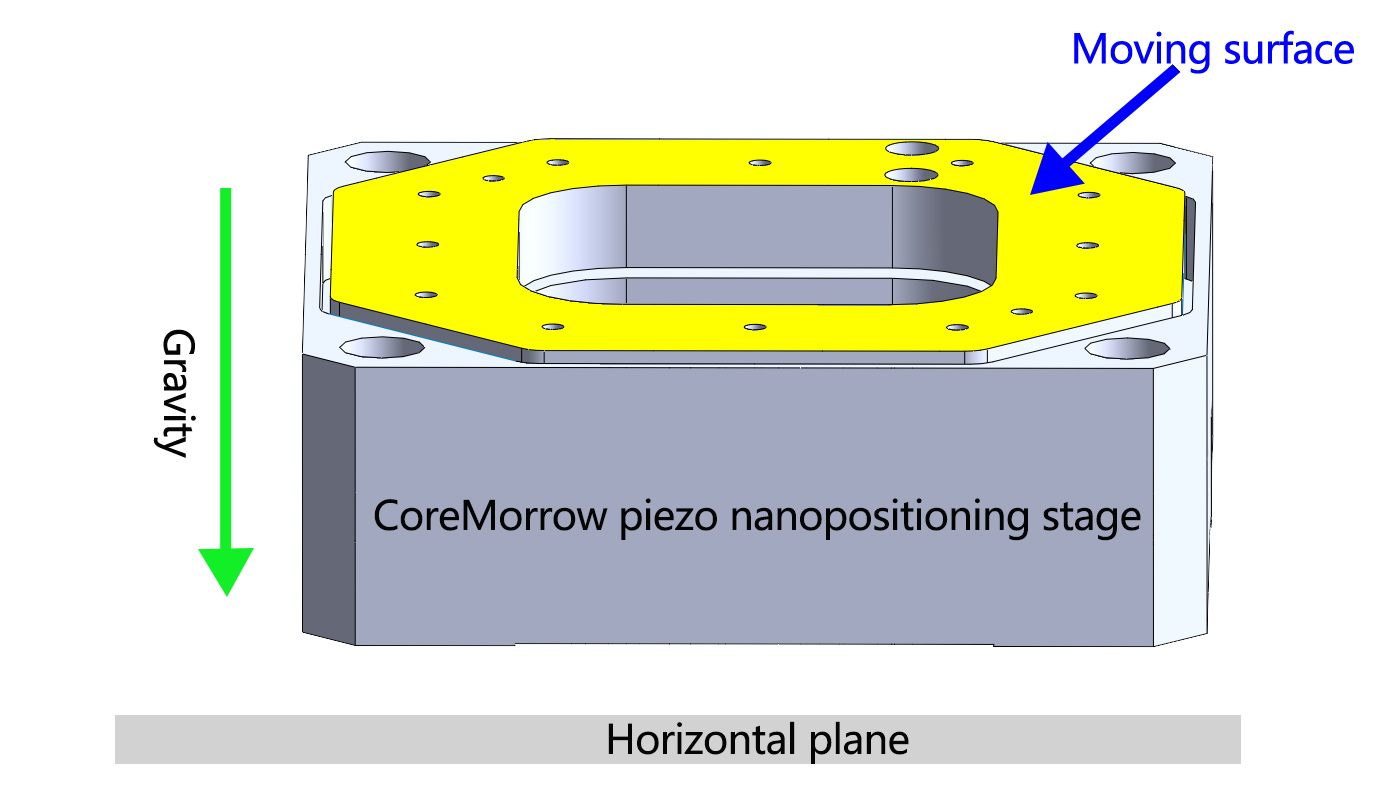
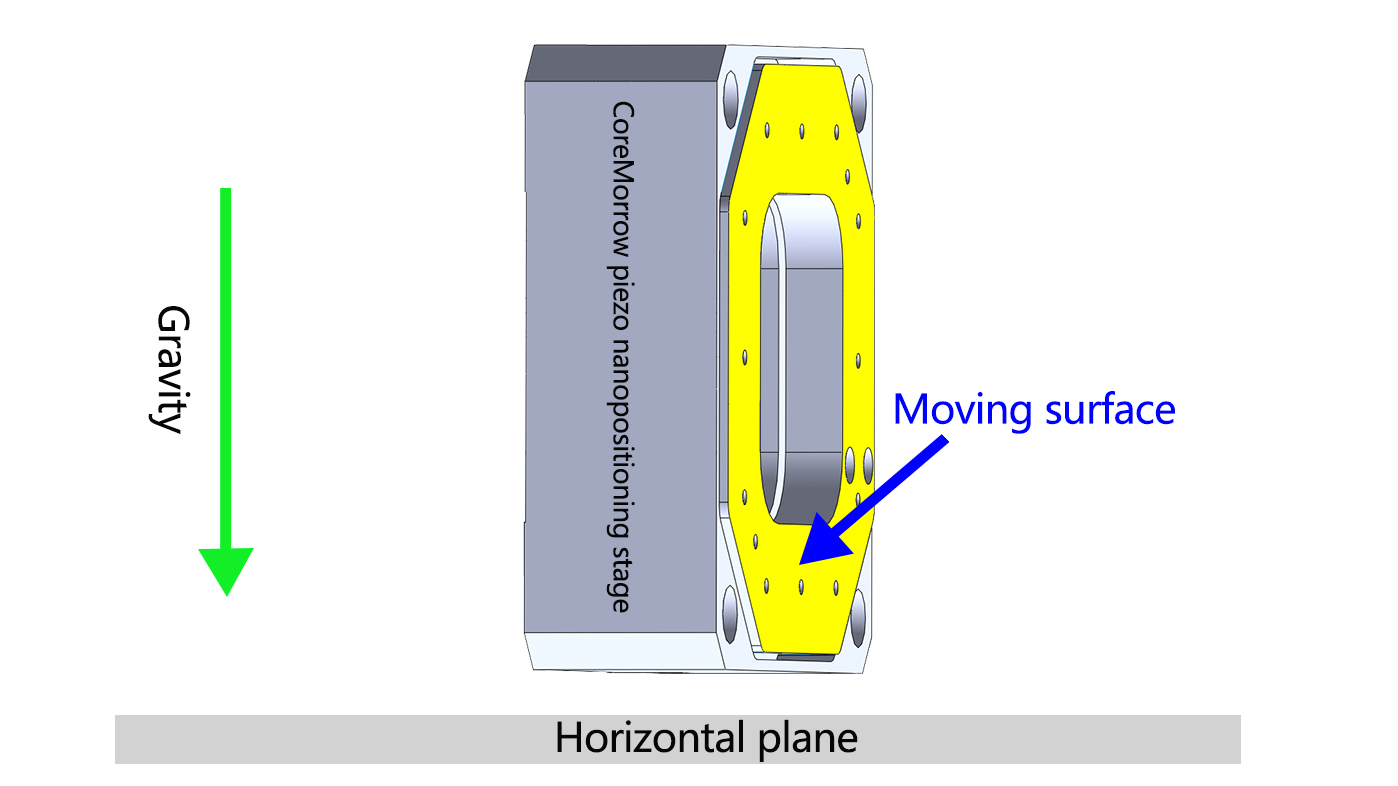
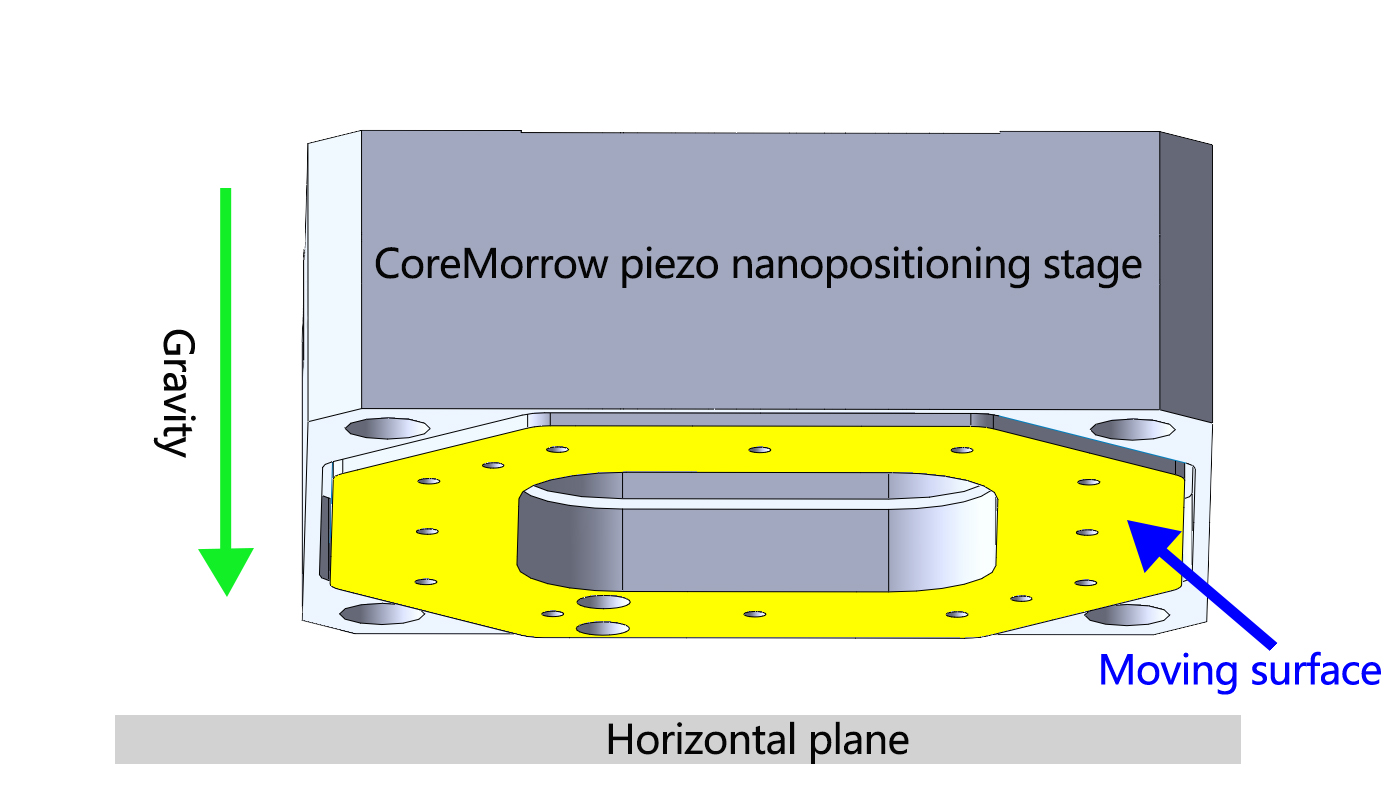
| Mounting Method |
Horizontal Mounting |
Vertical Mounting |
Inverted Mounting |
| Definition |
Place the PZT platform horizontally for installation, with the moving surface located above the PZT platform and parallel to the horizontal plane.
PS: Default direction for carrying capacity in the parameter table
|
Place and install the PZT platform vertically, with the moving surface parallel to the direction of gravity
|
Place the PZT platform horizontally, but the moving surface is located below the PZT platform |
| Diagram |
 |
 |
 |
| Note |
When the mounting method is selected as vertical mounting, pay attention to the outlet port |
||



Sweep, get the latest information on core tomorrow
Address:1F, Building I2, No.191 Xuefu Road, Nangang District, Harbin, China
Tel:0451-86268790
Piezo · Nano · Motion

Copyright@ CoreMorrow Ltd. 黑ICP备16009173号-1