

CoreMorrow Piezo Hexapod Delivered Successfully Attract Rreporters To Interview!
When it comes to the term hexapod, it can be traced back to 1965. It was proposed by the German scholar Stewart. It is a parallel-mechanism flight simulator with six-degree-of-freedom motion capability. The classic hexapod is composed of the upper and lower tabletops and six retractable outriggers and the connecting hinges between them are formed, wherein the lower tabletop is usually called the base table, and the upper tabletop is usually called the load platform. The hexapod can realize the six-degree-of-freedom motion of the load platform within the working space through the telescopic motion of the six outriggers, and has many advantages such as high rigidity, high precision, strong bearing capacity, and good dynamic characteristics. Therefore, it has been widely used in scientific research and commercial fields for many years.
Compared with the series mechanism, the hexapod has the advantages of high precision, high stiffness, stable structure, strong bearing capacity, small motion inertia, and good dynamic characteristics.
Stewart hexapod motion diagram
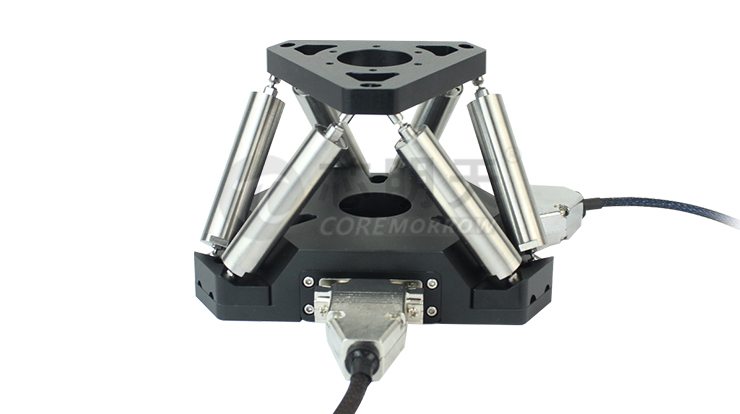
CoreMorrow piezo hexapod
Difficulty in design and assembly
Difficulty in control algorithm

Easy operate, good interactive communication of software
Accuracy control is simple, with Cartesian coordinate system
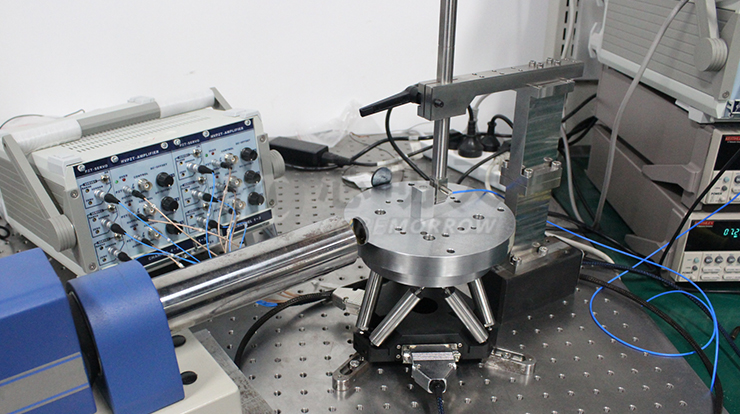
CoreMorrow Piezo Hexapod Testing
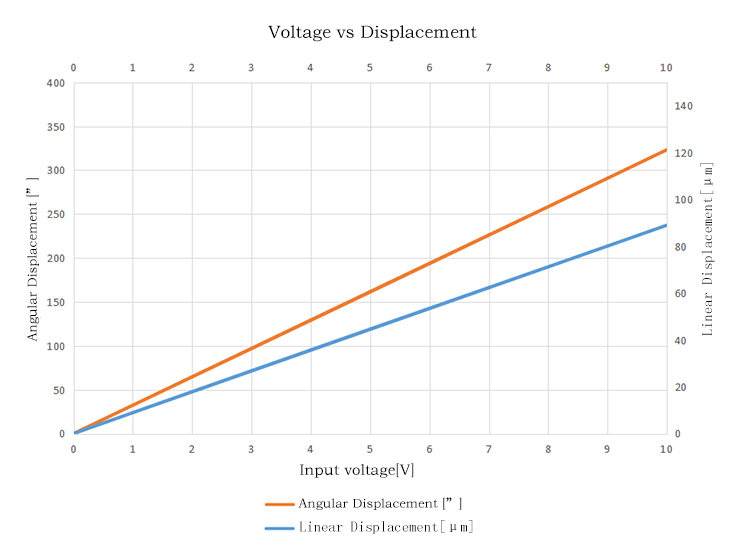
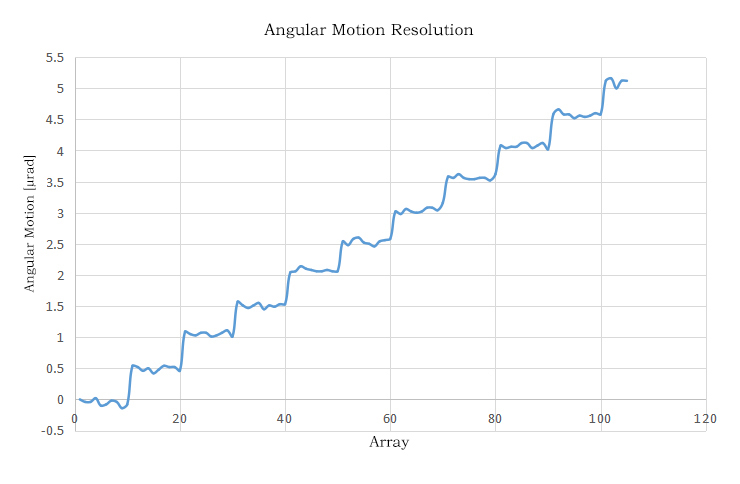
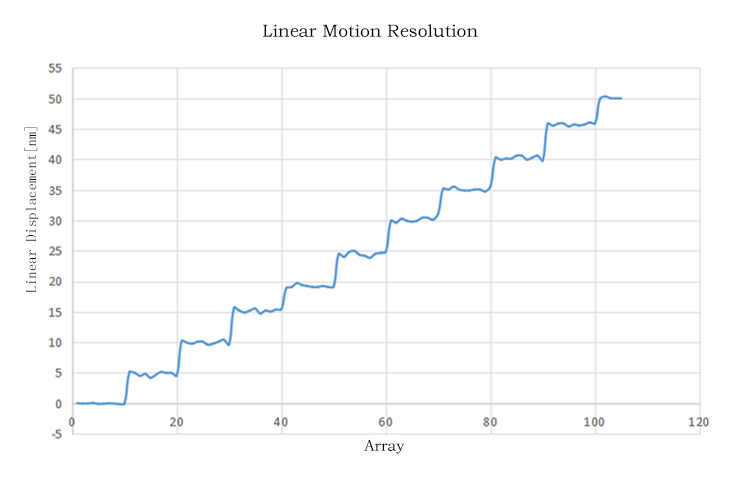
The measured performance parameters of CoreMorrow piezo hexapod are as follows.
Parameters
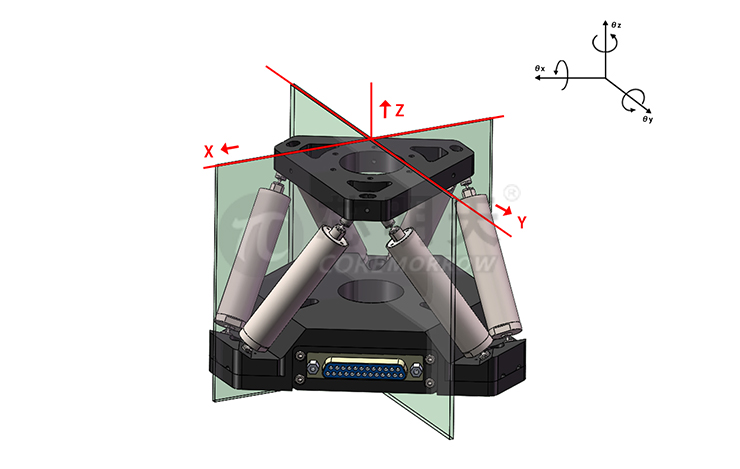
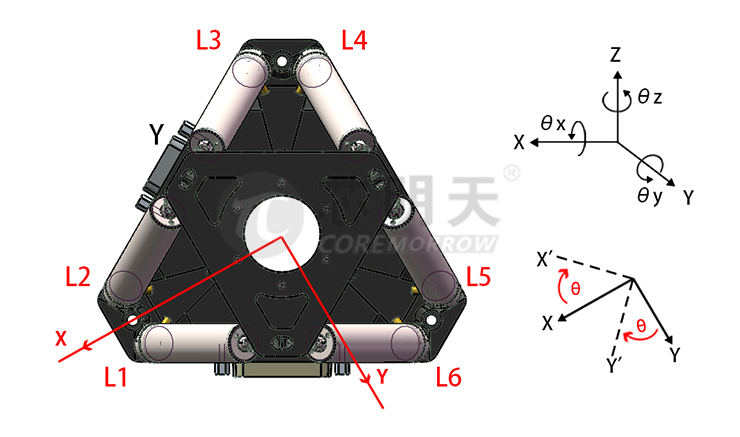
Degrees of freedom of motion: X, Y, Z, θx, θy, θz
Structural form: six degrees of freedom parallel
Driving method: Piezo
X, Y nominal travel range: 80µm
Z nominal travel range: 55µm
θx, θy angle range: 1.2mrad
θz angle range: 1.6mrad
Angular Resolution: >0.5μrad (0.1 sec)
Linear displacement resolution: > 0.5nm
Closed-loop linearity: >0.1%F.S.
Closed loop repeat positioning accuracy: >0.1%F.S.
Carrying capacity: 5kg
Weight: 1.3kg
Interview

In the report, Mr. Yang, deputy general manager of CoreMorrow, said: "As a leading enterprise in domestic precision positioning, we will better transform knowledge and experience into technologies and products, and will continue to increase research and development efforts, enrich product categories, and provide semiconductors Contribute to the localization of core devices.”
Sweep, get the latest information on core tomorrow
Address:1F, Building I2, No.191 Xuefu Road, Nangang District, Harbin, China
Tel:0451-86268790
Piezo · Nano · Motion
