

- Introduction
- Feedback
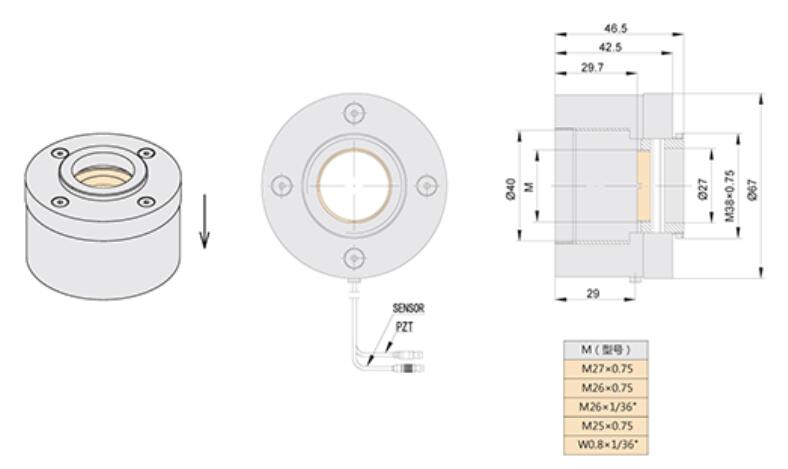
Strain sensors are mainly used to measure the deformation of a structural surface. Generally, during the entire process of applying force, the mechanical load-bearing structure will be strained by a tensile or compressive force greater or lesser than the required force. The strain sensor can perform indirect dynamic and quasi-static force measurement on it, and the relationship between the force and strain is linear enough to effectively meet the requirements of accurate measurement and monitoring. When using strain for indirect measurement, the force split can be close to 99%, much higher than direct measurement.
Strain sensors can be used for process monitoring of force, such as welding force
monitoring. The sensor is equipped with electronics and IEPE interface. The converter
type is 10-32UNF.
Characteristics

|
|
|
|
|

| Technical data | ||||
|
Parameter |
Min. |
Typ. |
Max. |
Unit |
|
Measured unit |
Strain in longer axis direction |
|
||
|
Sensitivity |
|
40 |
|
±10% at room temperature. |
|
Polarity |
Positive for applied tension |
|
||
|
Low frequency limit |
|
0.01 |
|
Hz |
|
Resonance frequency |
|
14.7 |
|
kHz |
|
Dynamic range |
|
100 |
|
µε |
|
Connector |
|
Coaxial 10-32 UNF |
|
|
|
Supply current |
2 |
4 |
20 |
mA |
|
DC bias voltage |
8 |
12 |
14 |
V |
|
DC bias stabilization |
|
60 |
|
s |
|
Mounting screw |
|
M6×20, conical head |
|
|
|
Mounting torque |
3 |
5 |
10 |
Nm |
|
Temperature range |
-40 |
|
+85 |
℃ |



Sweep, get the latest information on core tomorrow
Address:1F, Building I2, No.191 Xuefu Road, Nangang District, Harbin, China
Tel:0451-86268790
Piezo · Nano · Motion
