
XD780 Piezo Nanopositioning StageCurrent Location:Product Homepage >> X/Z Piezo Nanopositioner>>XD780 Piezo Nanopositioning Stage

- Introduction
- Feedback
XD780 is an X-axis piezo nanopositioning stage, with 50μm, 150μm or 200μm travel. It adopts a no-friction flexible hinge guiding mechanism and integrated structural design. It is equipped with high-performance piezo actuators to ensure 200μm displacement. The closed-loop version has a full bridge design which avoids temperature drift and ensures that the positioning accuracy is nanoscale.
Characteristics

|
|
|
|
|
|
|
|
|
|

|
XD780.50 
|
XD780.150/200 
|
Loaded Step Time XD780.50S loading 5kg(1V), the step time is about 15ms.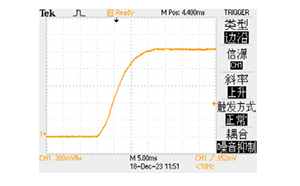
|
|
Closed-Loop Curve-XD780.150S 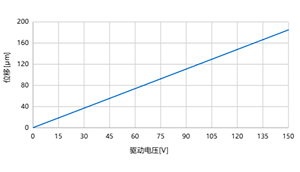
|
Z-direction multi head objective focusing 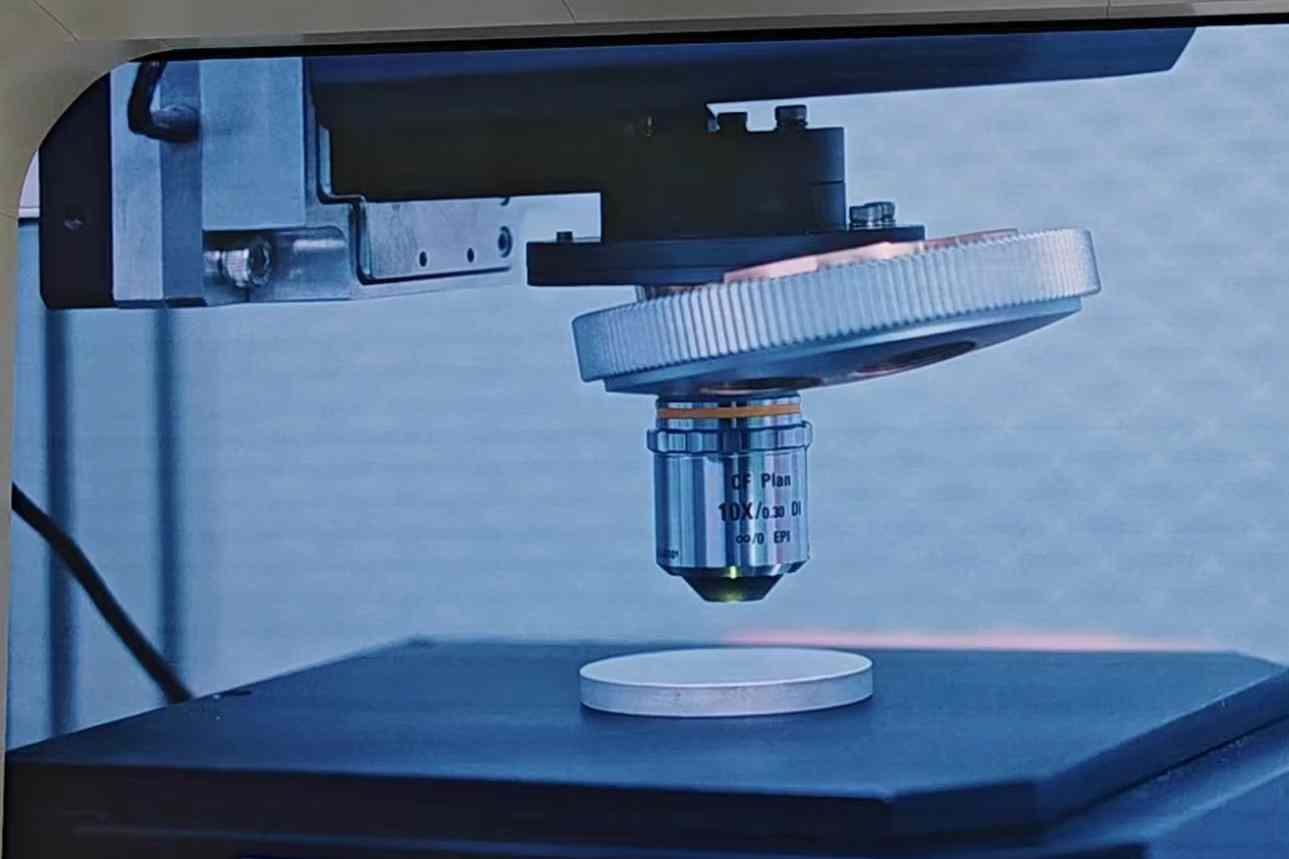
|
Z-direction multi head objective focusing 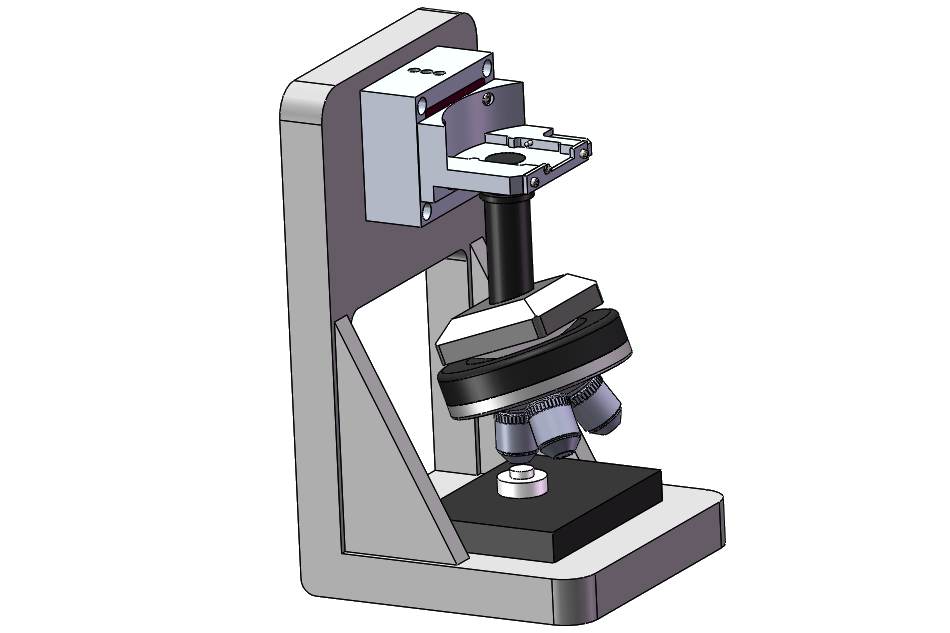
|
Application
|
|
|
|
|
|
|
|
|
|
| Technical Data | |||||
|
Type |
S-Closed loop |
XD780.50S |
XD780.150S |
XD780.200S |
Units |
|
Active axes |
X |
X |
X |
|
|
|
Drive control |
1 driving channel, 1 sensing channel |
|
|||
|
Nominal travel range(0~120V) |
40 |
120 |
160 |
μm±10% |
|
|
Max.travel range(0~150V) |
50 |
150 |
200 |
μm±10% |
|
|
Mechanism |
Direct Drive |
Amplified Drive |
Amplified Drive |
|
|
|
Sensor type |
SGS/- |
SGS/- |
SGS/- |
|
|
|
Resolution |
2/0.5 |
5/1.5 |
7/2 |
nm |
|
|
Linearity |
0.01/- |
0.03/- |
0.05/- |
%F.S. |
|
|
Repeatability |
0.02/- |
0.01/- |
0.02/- |
%F.S. |
|
|
Load capacity |
Horizontal |
5 |
5 |
5 |
kg |
|
Vertical |
0.05 or 5 |
0.05 or 5 |
0.05 or 5 |
||
|
Inverted |
5 |
5 |
5 |
||
|
Unloaded resonant frequency |
2200 |
760 |
700 |
Hz±20% |
|
|
Resonant frequency@5kg |
160 |
100 |
85 |
Hz±20% |
|
|
Step time |
15@5kg(1V)/7.5 |
30/4 |
50@5kg(1V)/10 |
ms±20% |
|
|
El. capacitance |
10.2 |
27.2 |
27.2 |
μF±20% |
|
|
Material |
Steel, Al |
Steel, Al |
Steel, Al |
|
|
|
Mass(Cable included) |
450 |
1000 |
<1051 |
g±5% |
|
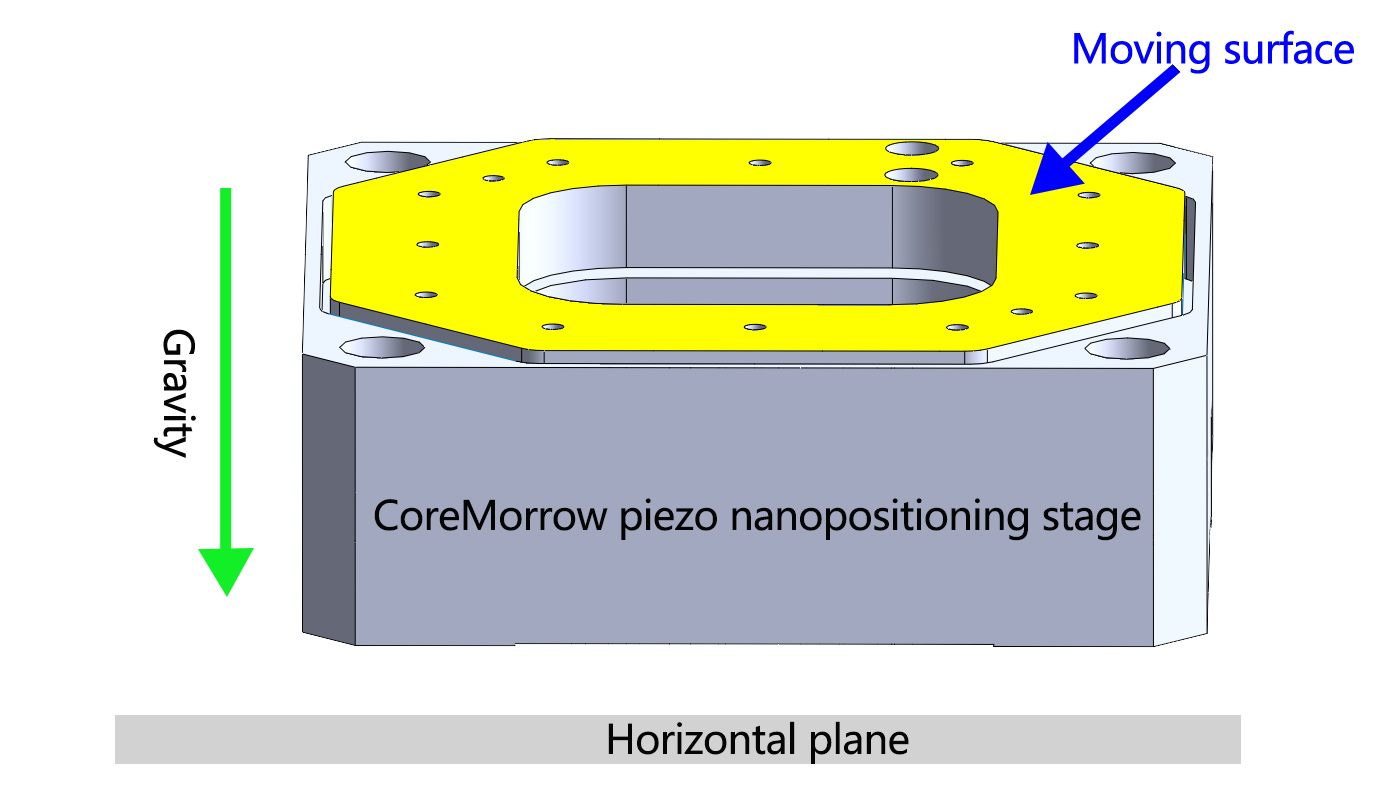
| Mounting Method |
Horizontal Mounting |
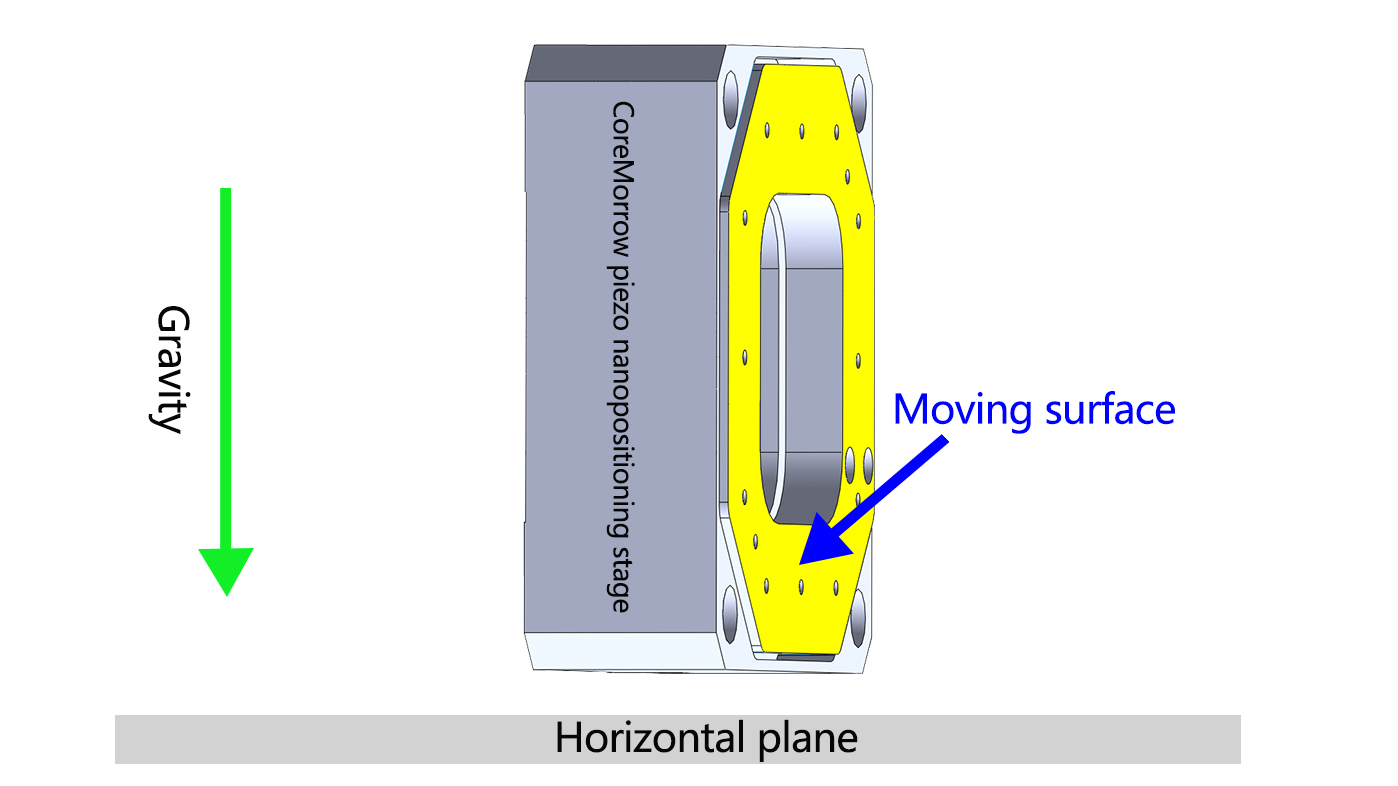
Vertical Mounting |
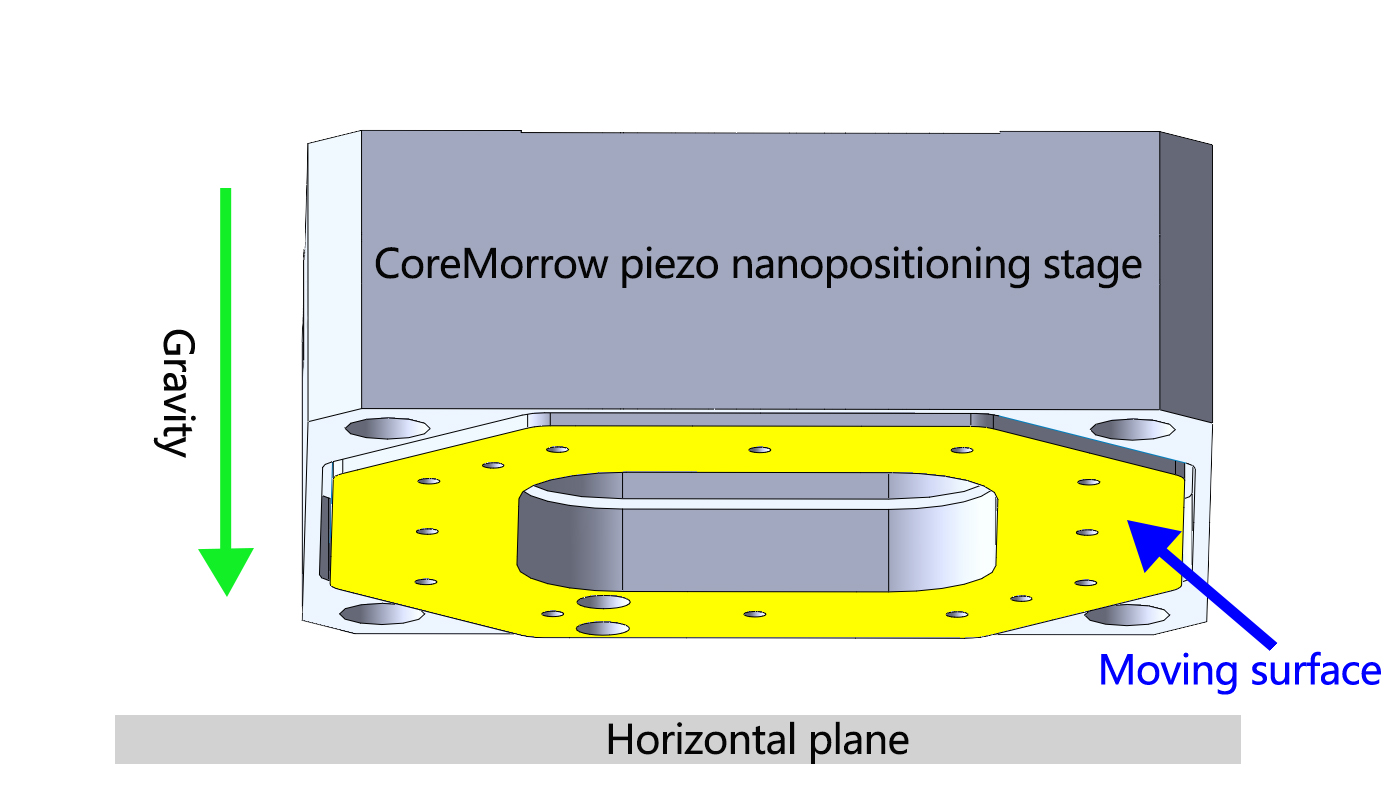
Inverted Mounting |
| Definition |
Place the PZT platform horizontally for installation, with the moving surface located above the PZT platform and parallel to the horizontal plane.
PS: Default direction for carrying capacity in the parameter table
|
Place and install the PZT platform vertically, with the moving surface parallel to the direction of gravity
|
Place the PZT platform horizontally, but the moving surface is located below the PZT platform |
| Diagram |
 |
 |
 |
| Note |
When the mounting method is selected as vertical mounting, pay attention to the outlet port |
||




Sweep, get the latest information on core tomorrow
Address:1F, Building I2, No.191 Xuefu Road, Nangang District, Harbin, China
Tel:0451-86268790
Piezo · Nano · Motion

Copyright@ CoreMorrow Ltd. 黑ICP备16009173号-1