- 产品介绍
- 应用
- 价格及周期
- 意见反馈
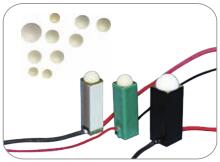
压电快反镜/偏转镜是以压电陶瓷作为驱动元件,内部采用无回差柔性铰链并联导向结构设计,外部机械结构通过内部多支压电陶瓷的伸缩来实现单轴或多轴角度偏转运动,补偿量小,偏转镜具有较好的运动精度和高稳定性,通过内置高精度传感器进行闭环控制,实现亚微弧度分辨率及微弧度定位精度。
S22系列小体积压电快反镜/偏转镜是一维θx轴快反镜/偏转镜,柔性铰链导向设计具有零摩擦及静态阻力、优异的导向精度。提供纳弧度的分辨率和优异的定位稳定性。光束偏转范围可达6mrad, 具有快的响应速度(毫秒至微秒级),适于动态操作(例如跟踪、扫描、漂移及振动消除)及光学和样品的静态定位。
产品特点

|
|
|
|
|
|
|
|
|
|

|
运动方式 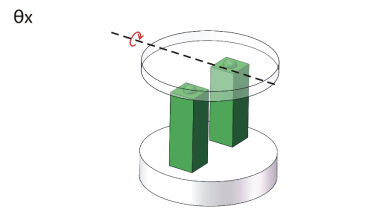
|
结构原理
平台由一个铰链支撑,并且由一个线性压电促动器推动。铰链确定了轴心点,兼起到给压电促动器施加预紧力的作用。单个铰链单个促动器设计的优点是结构简单、体积小巧、性价比高等。 |
结构原理 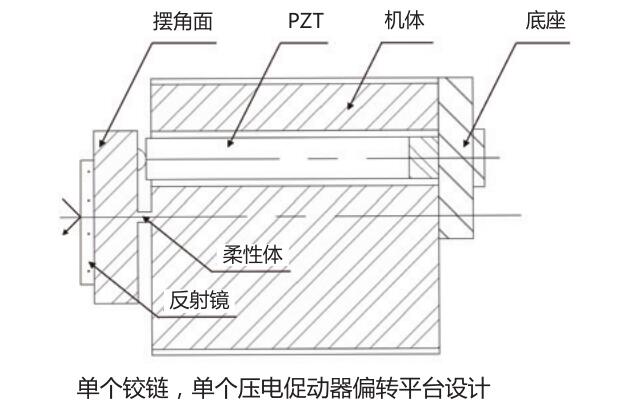
|
|
小体积、高动态、开环闭环可选 超小体积设计,具有非常快的响应速度,可带载 Ø15mm 的镜片实现 0.8ms 的阶跃时间。 |
频率负载曲线 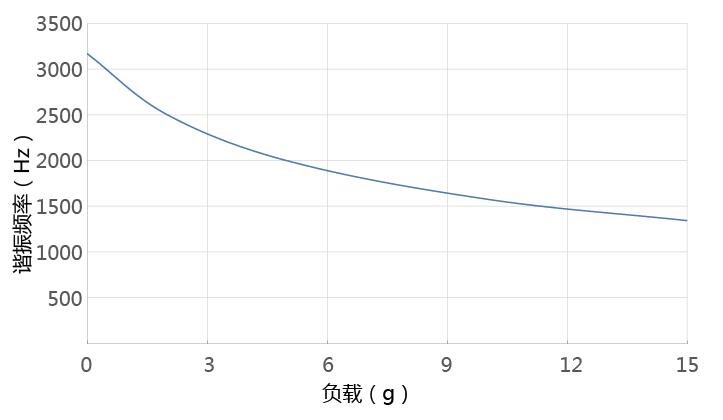
|
角位移与电压曲线 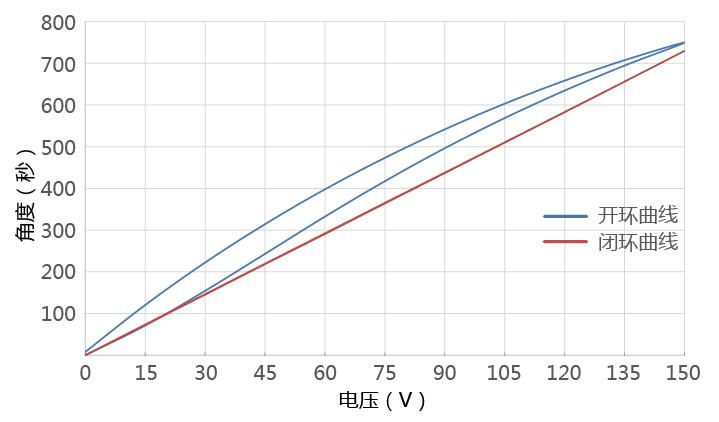
|

|
线性度曲线 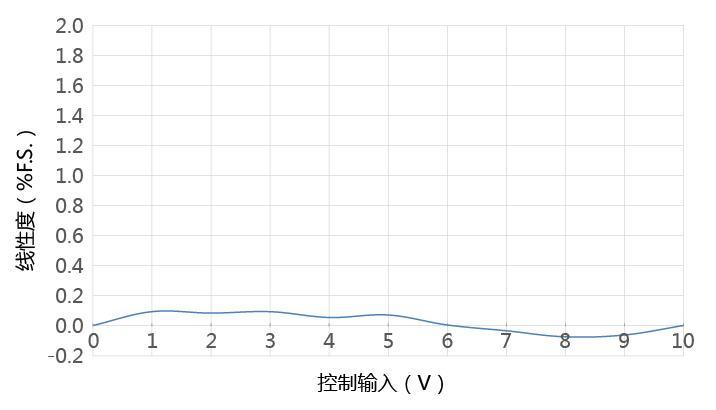
|
产品应用
|
|
|
|
|
|
|
|
|
|
| 技术参数 | ||||
|
型号 |
尾缀S-闭环 |
S22.U3S |
S22.U3K |
单位 |
|
尾缀K-开环 |
||||
|
运动自由度 |
θx |
θx |
|
|
|
运动和定位 |
||||
|
驱动控制 |
1路驱动,1路传感 |
1路驱动 |
|
|
|
标称偏转角度(0~+120V) |
2.5 |
2.5 |
mrad±10% |
|
|
Max.偏转角度(0~150V) |
3 |
3 |
mrad±10% |
|
|
传感器类型 |
SGS |
- |
|
|
|
分辨率 |
0.08(≈0.02秒) |
0.03(≈0.01秒) |
µrad |
|
|
闭环线性度 |
0.2 |
- |
%F.S. |
|
|
闭环重复定位精度 |
0.15 |
- |
%F.S. |
|
|
机械性能 |
||||
|
空载谐振频率 |
3 |
3 |
kHz±20% |
|
|
空载阶跃时间 |
3 |
0.8 |
ms±20% |
|
|
驱动性能 |
||||
|
静电容量 |
1.8 |
1.8 |
μF±20% |
|
|
其它 |
||||
|
工作温度范围** |
-20~80 |
-20~80 |
°C |
|
|
材质 |
钢 |
钢 |
|
|
|
外形尺寸(长×宽×高) |
33×14×24 |
33×14×24 |
mm |
|
|
重量 |
80 |
80 |
g±5% |
|
|
出线长 |
1.5 |
1.5 |
m±10mm |
|
|
传感/电压连接器*** |
LEMO |
LEMO |
||
** 可定制低温版本及高真空版本。
*** 连接器可定制。
注:以上所提参数与测试环境、测试设备有关。
注:以上参数是采用E00/E01系列压电控制器测得,Max.驱动电压可在-20V~150V;对于高可靠的长期使用,建议驱动电压在0~120V。



应用案例
|
跟踪、稳像 
|
笼式结构 
|
快速激光束偏转及扫描 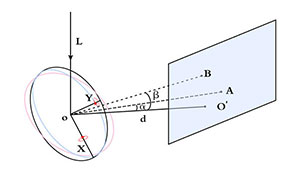
|
|
变形镜 
|
激光稳定系统 
|
激光加工 
|
|
|
|
|
|
|
陶瓷转接头 |
氧化铝转接头 |
金属转接头 |
促动器柔性转接头 |
|
|
|
|
|
|
钨钢垫片 |
热稳定散热片 |
促动器与平台转接座 |
促动器测试支架 |
|
|
|
|
|
|
粘镜片胶水 |
P34 镜片转接架 |
P32/ P33 镜片转接架 |
P32/P33 镜片转接座 |
|
|
|
|
|
|
P22 测试支架 |
P32/P33 测试支架 |
P34 测试支架 |
P31/P54 测试支架 |
|
|
|
|
|
|
BNC转LEMO |
BNC转鱼夹 |
单芯LEMO座转鱼夹 |
单芯LEMO线 |
|
|
|
|
|
|
BNC连接头转鱼夹 |
LEMO 连接器 |
测试支架 |
磁力表座 |