

检测方法
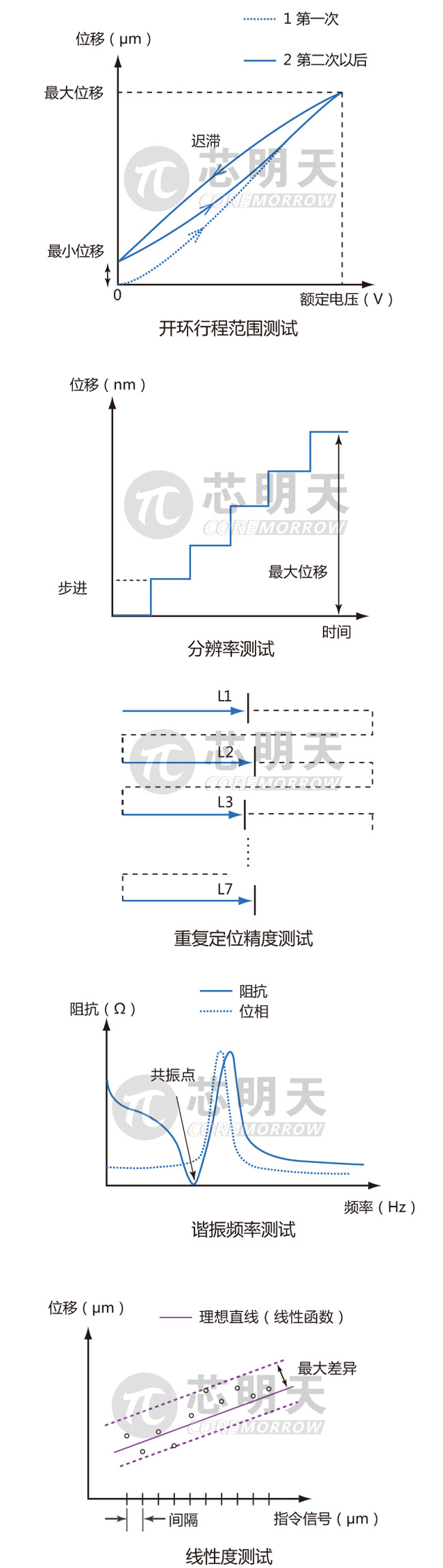
行程范围(开环)
把电压从0V以恒定的速率增加到额定电压,然后再以相同速率降到0V。
重复以上操作5次,把最大位移和最小位移值画入第五次循环迟滞曲线,作为开环位移值。
分辨率
输入最小的步进位置命令,相对于任一点(一个参考测量位置)朝着正方向或负方向至少5步,然后测量实际位置。最大位移除以n(步数)即为分辨率。分辨率适用于有位置传感的闭环控制。
开环控制分辨率(理论分辨率)即使开环控制操作也可以通过很小的步进信号实现精密的纳米级步进。然而,该分辨率表示的是在没有读取位移传感器信号的情况下由施加小电压引起的微小移动量,因此也被称为“理论分辨率”。我们将分辨率定义为在闭环反馈控制的情况下可以主动控制位置的最小步长。
重复定位精度
重复定位到任意点,测量停止位置至少7次,然后获得测量值的最大差值的1/2。该测量应在行程的中心进行,并且根据需要在行程的两端进行。 重复定位精度只能进行闭环控制的检查。
谐振频率
在通过使用阻抗分析仪器检查相位改变的部分时,测量谐振点的频率(阻抗最低的部分)。
可替代测量方法:
输入矩形波并测量谐振频率
通过扫频输入正弦波并测量谐振频率
线性度
从基准位置(零位置)以一定间隔连续地进行定位,并测量行进方向上的位置。基于测量结果通过最小二乘法近似理想线(线性函数),并以理想线作为参考,以识别与实际测量的差异最高的点。线性度只能用于带有内置位移传感器的闭环控制。
