| 压电 纳米 定位 |
产品中心 >> 压电偏转镜/偏摆台 >> P34系列压电偏转镜
压电偏转镜是以压电陶瓷作为驱动元件,内部采用无回差柔性铰链并联导向结构设计,外部机械结构通过内部多支压电陶瓷的伸缩来实现单轴或多轴角度偏转运动,补偿量小,偏转镜具有高的运动精度和稳定性,通过内置高精度传感器进行闭环控制,实现亚微弧度分辨率及微弧度定位精度。
P34系列压电偏转镜是专为大直径镜片而设计,可加载直径达80mm的镜片,它的差分驱动在较大温度范围内表现出出色的角度定位稳定性。P34系列偏转镜允许顶部平台在具有共同枢轴点(并联运动)的两个正交轴上进行高动态精密偏转运动,多种镜片安装面可选,以获得对不同镜片材料的理想热适应。开环、闭环版本可供选择,所有版本都具有亚微弧度分辨率,且倾斜角度可达6mrad(等于光束偏转12mrad)。
特点
• θx,θy二维偏转,偏转角度6mrad • 闭环定位精度高 • 分辨率高 • 温度稳定性高 • 亚毫秒响应时间
运动方式

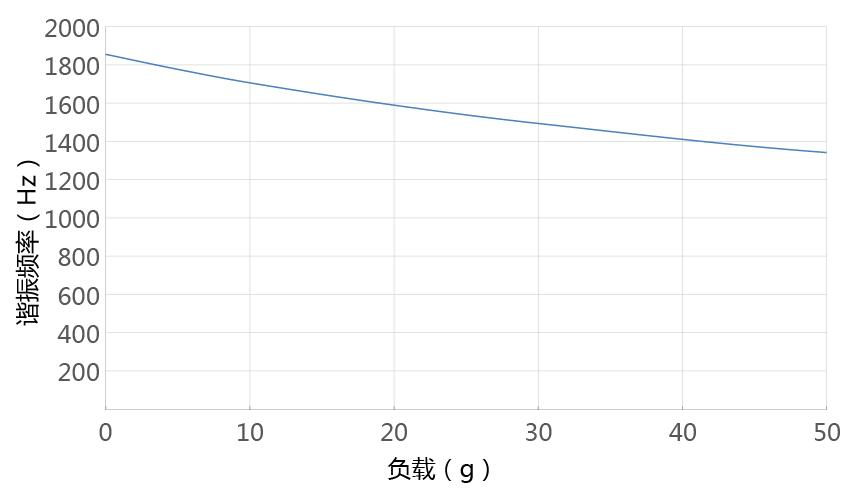
频率负载曲线
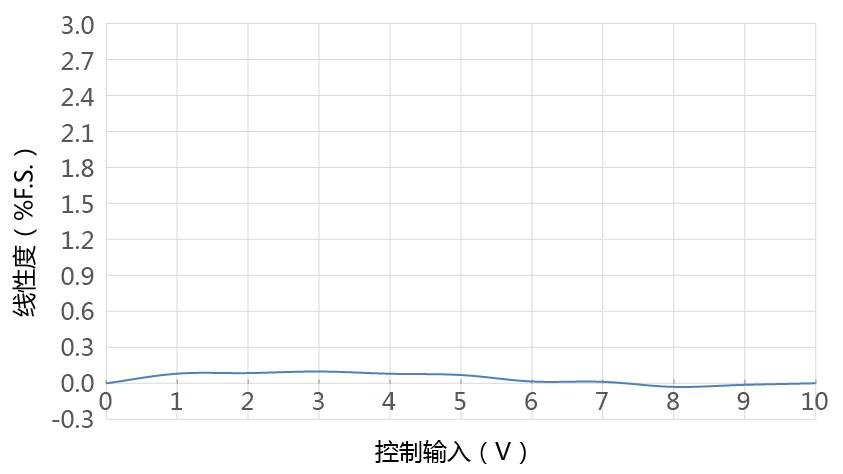
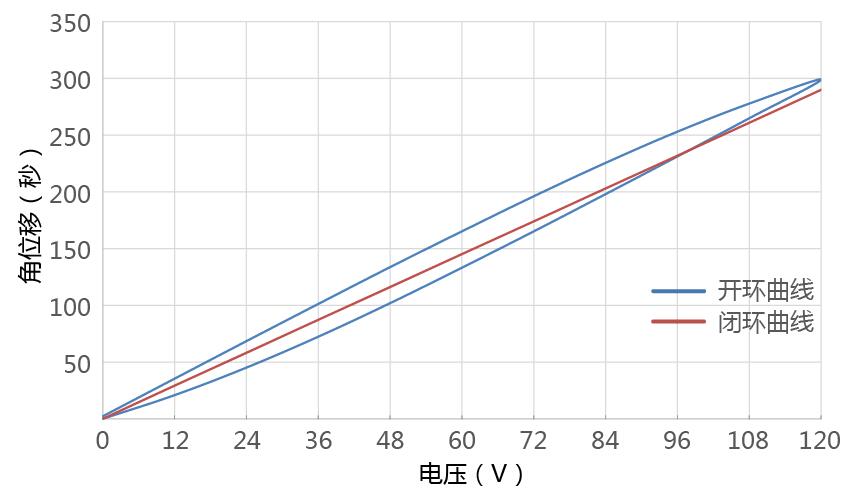
闭环曲线
闭环传感输出监测电压与偏转镜输出偏转角度成线性关系。
高稳定性、线性度及动态性、使用寿命长
芯明天压电俯仰/偏转镜系统是基于平行运动学设计,两个方向偏转运动共用同一个移动面。内部四个压电促动器是成对的差分控制,决定了平台俯仰/偏转运动。这使得P34压电倾斜镜在较大温差变化范围的环境中具有较好的角度定位稳定性。
内部采用芯明天叠堆型压电促动器可保证可靠性。特殊树脂绝缘使其可抵抗环境湿度及漏电流故障。所以在可靠性及寿命上远优于传统压电促动器。
结构原理
偏转镜(两轴)是基于4个压电陶瓷结构设计而成,每轴采用两个压电陶瓷,以推拉模式形成偏摆运动,采用桥式连接电路控制。四个执行机构(压电促动器)以90°角平分放置,是成对的差异控制分布形式。
通过差分结构的设计可以在大范围的温度变化下保持良好的角度稳定性,这样就可以保证温度的变化仅能影响到平台的垂直方向定位,而对角度定位则没有影响,在闭环下,可以保证系统的线性度和分辨率。

可负载大镜片
P34系列压电偏转镜可负载直径达80mm的镜片,实现12mrad的光束偏转。
可定制镜片转接座
可依据您的镜片尺寸及形状定制镜片转接适配座。
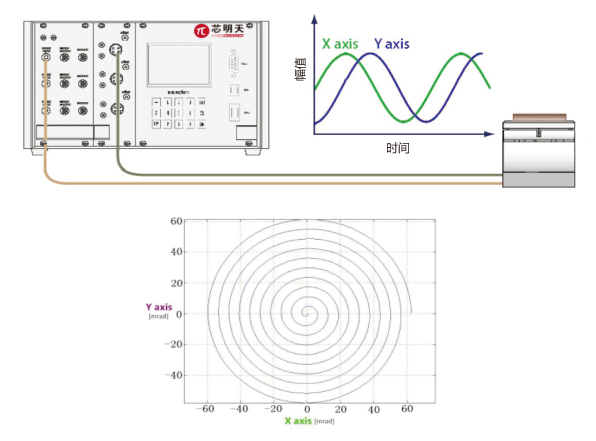
驱动控制
P34压电偏转台θxθy两轴采用90。相差输入,通过控制电压的大小,对不同的光路距离,可进行一定范围的圆形范围扫描,如下右图所示。
应用
• 图像处理/稳定 • 光束扫描 • 隔行扫描、抖动 • 光束偏摆/稳定 • 光学、激光扫描、通信 • 光学滤波器/开关 • 光学显微成像 • SPM扫描显微镜 • 自适应光学、稳像 • 干涉
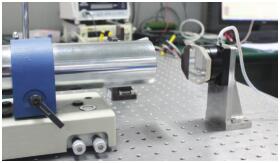
产品测试


技术参数(P34.T1, 1.5mrad)
型号 |
尾缀S-闭环 |
P34.T1S |
单位 |
尾缀K-开环 |
|||
运动自由度 |
θx,θy |
|
|
运动和定位 |
|||
标称偏转角度 |
1.2或±0.6 |
mrad±20% |
|
偏转角度 |
1.5或±0.75 |
mrad±20% |
|
传感器类型 |
SGS/- |
|
|
闭/开环分辨率 |
0.1/0.02 |
µrad |
|
闭环线性度 |
0.1/- |
%F.S. |
|
闭环重复定位精度 |
0.02/- |
%F.S. |
|
机械性能 |
|||
空载谐振频率 |
2 |
kHz±20% |
|
加载后谐振频率 |
1.3 |
kHz±20% |
|
闭/开环空载阶跃时间 |
2/1 |
ms±20% |
|
空载工作频率* |
10%行程 |
1000 |
Hz±20% |
100%行程 |
100 |
||
驱动性能 |
|||
静电容量 |
3.6 |
μF/轴±20% |
|
其它 |
|||
工作温度范围** |
-20~80 |
°C |
|
材质 |
铝 |
|
|
外形尺寸(长×宽×高) |
59.5×59.5×38 |
mm |
|
重量 |
200 |
g±5% |
|
出线长 |
1.5 |
m±10mm |
|
传感/电压连接器*** |
LEMO |
||
技术参数(P34.T2, 3mrad)
型号 |
尾缀S-闭环 |
P34.T2S |
单位 |
尾缀K-开环 |
|||
运动自由度 |
θx,θy |
|
|
运动和定位 |
|||
标称偏转角度 |
2.5或±1.25 |
mrad±20% |
|
偏转角度 |
3或±1.5 |
mrad±20% |
|
传感器类型 |
SGS/- |
|
|
闭/开环分辨率 |
0.2/0.1 |
µrad |
|
闭环线性度 |
0.2/- |
%F.S. |
|
闭环重复定位精度 |
0.02/- |
%F.S. |
|
机械性能 |
|||
空载谐振频率 |
1.4 |
kHz±20% |
|
加载后谐振频率 |
0.7 |
kHz±20% |
|
闭/开环空载阶跃时间 |
4/2 |
ms±20% |
|
空载工作频率* |
10%行程 |
500 |
Hz±20% |
100%行程 |
50 |
||
驱动性能 |
|||
静电容量 |
7.2 |
μF/轴±20% |
|
其它 |
|||
工作温度范围** |
-20~80 |
°C |
|
材质 |
铝 |
|
|
外形尺寸 |
59.5×59.5×56 |
mm |
|
重量 |
400 |
g±5% |
|
出线长 |
1.5 |
m±10mm |
|
传感/电压连接器*** |
LEMO |
||
技术参数(P34.T4, 6mrad)
型号 |
尾缀S-闭环 |
P34.T4S |
单位 |
尾缀K-开环 |
|||
运动自由度 |
θx,θy |
|
|
运动和定位 |
|||
标称偏转角度(0~+120V) |
5或±2.5 |
mrad±20% |
|
偏转角度(0~+150V) |
6或±3 |
mrad±20% |
|
传感器类型 |
SGS/- |
|
|
闭/开环分辨率 |
0.4/0.2 |
µrad |
|
闭环线性度 |
0.3/- |
%F.S. |
|
闭环重复定位精度 |
0.02/- |
%F.S. |
|
机械性能 |
|||
空载谐振频率 |
0.9 |
kHz±20% |
|
加载后谐振频率(Φ80x15mm镜片) |
0.4 |
kHz±20% |
|
闭/开环空载阶跃时间 |
10/4 |
ms±20% |
|
空载工作频率* |
10%行程 |
240 |
Hz±20% |
100%行程 |
20 |
||
驱动性能 |
|||
静电容量 |
14.5 |
μF/轴±20% |
|
其它 |
|||
工作温度范围** |
-20~80 |
°C |
|
材质 |
铝 |
|
|
外形尺寸(长×宽×高) |
59.5×59.5×92 |
mm |
|
重量 |
800 |
g±5% |
|
出线长 |
1.5 |
m±10mm |
|
传感/电压连接器*** |
LEMO |
||
*若此工作频率已接近或超过谐振频率,建议在小于谐振频率以下使用,若在此频率下工作,输入电压要足够小,请务必从信号逐渐调试。开环使用时可达到的工作频率大于闭环使用时工作频率。
** 可定制低温版本及高真空版本。
*** 连接器可定制。
注:以上所提参数与测试环境、测试设备有关。 运动台面平行度约20μm,粗糙度约1.6至3.2,特殊要求请在购买前与销售工程师确认。
注:以上参数是采用E00/E01系列压电控制器测得,最大驱动电压可在-20V~150V;对于高可靠的长期使用,建议驱动电压在0~120V。
尺寸图
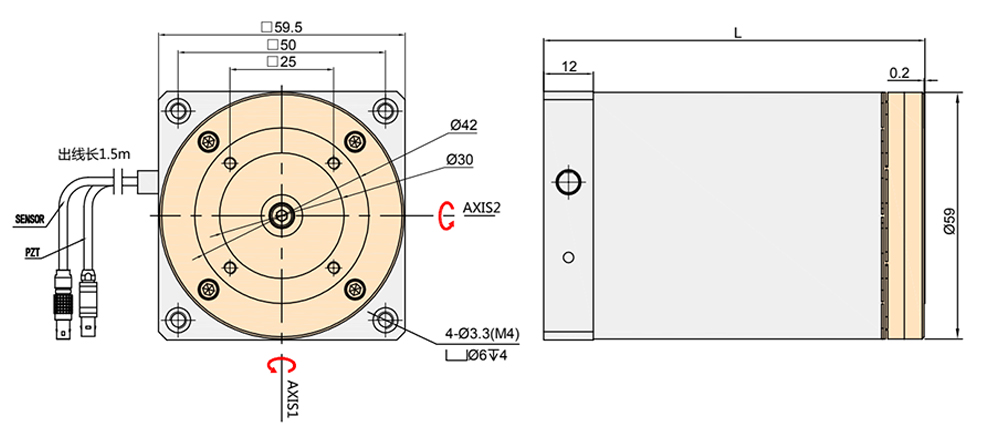
| 尺寸图下载 | |
| Auto CAD PDF |
|
| Step |
|
| 参数表/Specs Sheet |
|
联系我们
哈尔滨芯明天科技有限公司
总机:0451-86268790
传真:0451-86267847
邮箱:info@coremorrow.com
网址:www.coremorrow.com
地址:黑龙江省哈尔滨市南岗区学府路191号创业孵化产业园I2栋一层
| 关于我们 | 产品中心 | 产品应用 | 联系我们 |
请关注芯明天微信公众号或芯明天官网:www.coremorrow.com www.coremorrow.cn获取更多信息。

