| 压电 纳米 定位 |
产品中心 >> 压电偏转镜/偏摆台 >> P33系列压电偏转镜

压电偏转镜是以压电陶瓷作为驱动元件,内部采用无回差柔性铰链并联导向结构设计,外部机械结构通过内部多支压电陶瓷的伸缩来实现单轴或多轴角度偏转运动,补偿量小,偏转镜具有较好的运动精度和高的稳定性,通过内置高精度传感器进行闭环控制,实现亚微弧度分辨率及微弧度定位精度。
P33压电偏转镜是具有快速响应且体积紧凑等特点的偏转平台,提供顶端面的高精度角度运动,与其他执行器相比,柔性铰链导向的压电偏转平台可提供高的加速度,使阶跃响应时间在亚毫秒范围。闭环与开环版本具有6个不同的偏转范围,可达25mrad的光束偏转。
特点
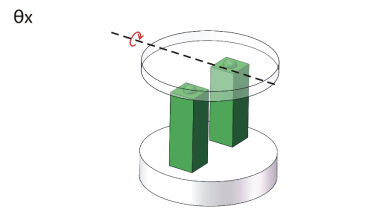
• θx一维偏转,偏转角度可达12.5mrad • 闭环定位精度高 • 分辨率高 • 温度稳定性高 • 亚毫秒响应时间
运动方式
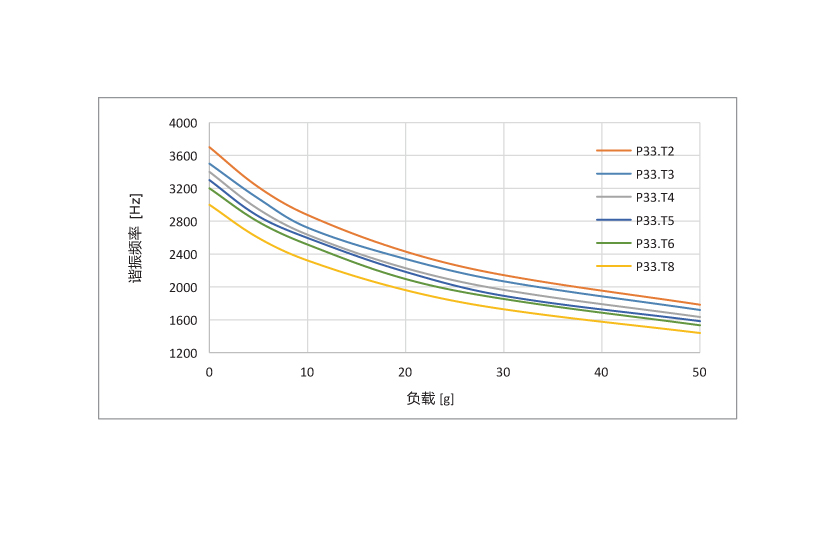
频率负载曲线

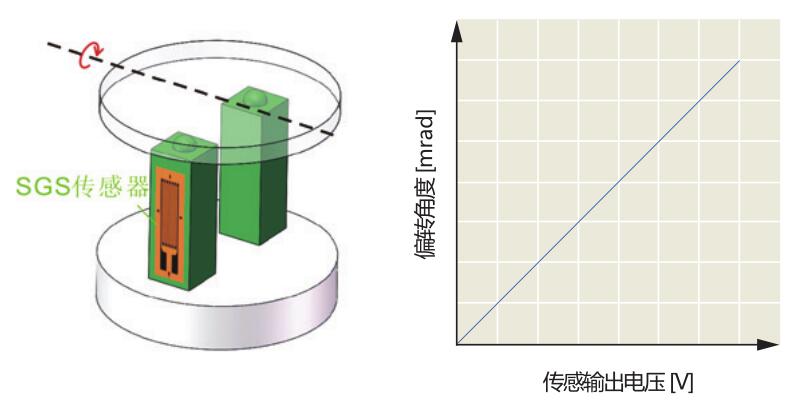
闭环曲线
闭环传感输出监测电压与偏转镜输出偏转角度成线性关系。
高动态、闭环版本精度高
P33系列压电偏转镜采用了无摩擦、柔性铰链导向结构设计,绝缘压电陶瓷驱动,实现偏转范围12.5mrad,提供高的加速度,快速响应达毫秒量级或快。
在机械结构的合适位置采用绝对测量的应变传感器来得到高稳定性及定位精度,他们提供了较高的带宽并向控制器发送定位反馈信号,传感器以桥式配置连接以消除热漂移从 而优质的稳定性。
可带载镜片直径40mm,产品已成功应用于卫星激光通信等领域。
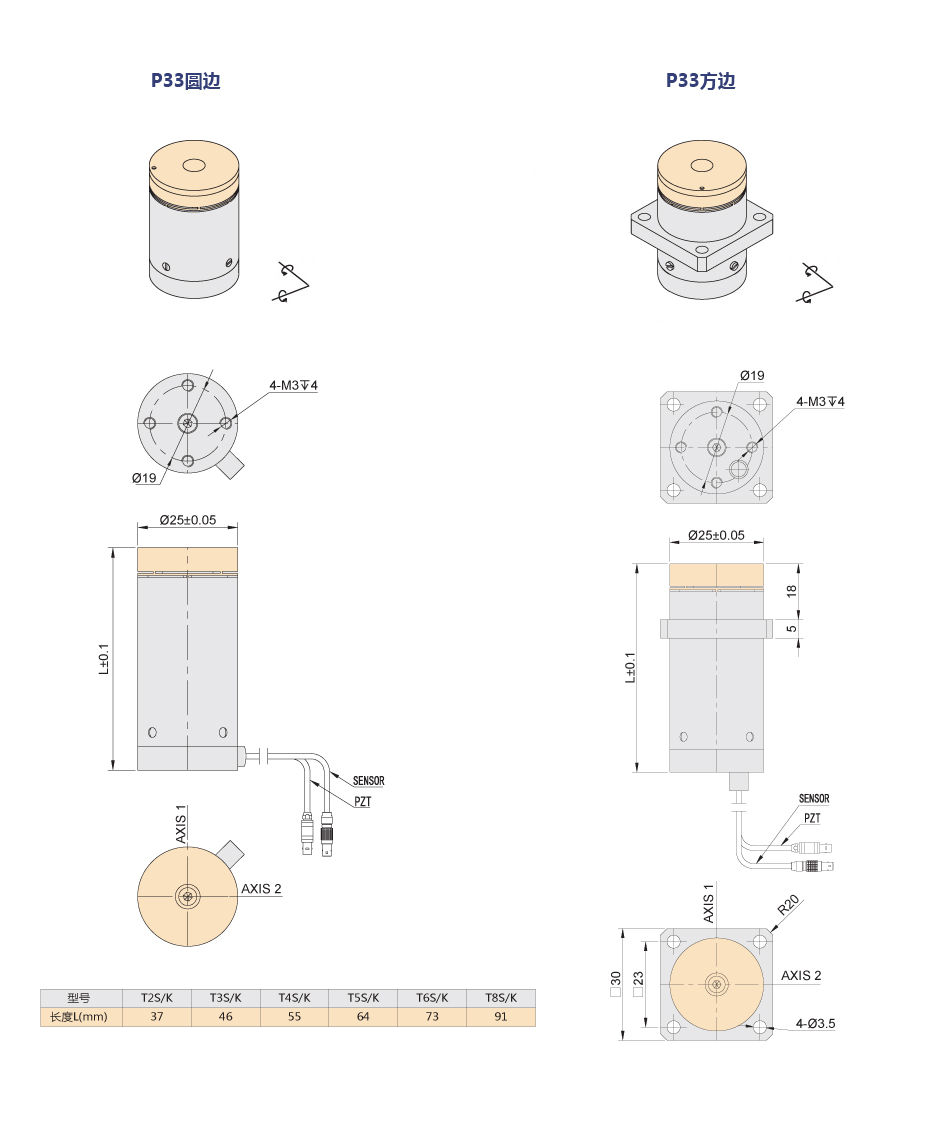
P33系列压电偏转镜的固定方式分底部固定及腰部固定,详见尺寸图。
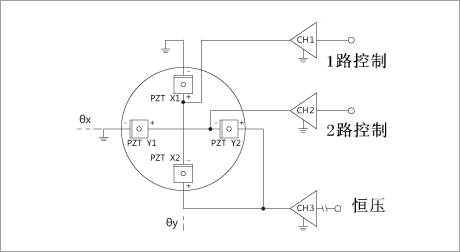
结构原理
P33.U系列为一维运动压电偏转镜,它的原理与二维运动的P33.T系列相同,在P33.T系列的基础上,将减少一对压电陶瓷,内部由两支压电陶瓷驱动 。
P33.T偏转镜(两轴)是基于4个压电陶瓷结构设计而成,每轴采用两个压电陶瓷,以推拉模式形成偏摆运动,采用桥式连接电路控制。四个执行机构(压电促动器)以90°角平分放置,是成对的差异控制分布形式,如下图所示。
通过差分结构的设计可以在大范围的温度变化下保持良好的角度稳定性,这样就可以保证温度的变化仅能影响到平台的垂直方向定位,而对角度定位则没有影响,在闭环下,可以保证系统的线性度和分辨率。
应用
• 图像处理/稳定 • 光束扫描 • 隔行扫描、抖动 • 光束偏摆/稳定 • 光学、激光扫描、通信 • 光学滤波器/开关 • 光学显微成像 • SPM扫描显微镜 • 自适应光学、稳像 • 干涉
产品测试


技术参数(P33.U2, 2.5mrad)
型号 |
尾缀S-闭环 |
P33.U2S |
单位 |
尾缀K-开环 |
|||
运动自由度 |
θx |
|
|
运动和定位 |
|||
标称偏转角度 |
2.5或±1.25 |
mrad±20% |
|
偏转角度 |
3或±1.5 |
mrad±20% |
|
传感器类型 |
SGS/- |
|
|
闭/开环分辨率 |
0.05/0.02 |
µrad |
|
闭环线性度 |
0.1/- |
%F.S. |
|
闭环重复定位精度 |
0.02/- |
%F.S. |
|
机械性能 |
|||
空载谐振频率 |
3.7 |
kHz±20% |
|
加载后谐振频率 |
2.6 |
kHz±20% |
|
闭/开环空载阶跃时间 |
1.5/1 |
ms±20% |
|
闭环空载 |
10%行程 |
1000 |
Hz±20% |
100%行程 |
80 |
||
驱动性能 |
|||
静电容量 |
3.6 |
μF±20% |
|
其它 |
|||
工作温度范围** |
-20~80 |
°C |
|
材质 |
钢 |
|
|
外形尺寸 |
25×37 |
mm |
|
方边外形尺寸 |
30×30×37 |
mm |
|
重量 |
190 |
g±5% |
|
出线长 |
1.5 |
m±10mm |
|
传感/电压连接器*** |
LEMO |
||
技术参数(P33.U3, 4mrad)
型号 |
尾缀S-闭环 |
P33.U3S |
单位 |
尾缀K-开环 |
|||
运动自由度 |
θx |
|
|
运动和定位 |
|||
标称偏转角度(0~+120V) |
4或±2 |
mrad±20% |
|
偏转角度(-20~+150V) |
5或±2.5 |
mrad±20% |
|
传感器类型 |
SGS/- |
|
|
闭/开环分辨率 |
0.15/0.05 |
µrad |
|
闭环线性度 |
0.15/- |
%F.S. |
|
闭环重复定位精度 |
0.02/- |
%F.S. |
|
机械性能 |
|||
空载谐振频率 |
3.5 |
kHz±20% |
|
加载后谐振频率(Φ25x8mm镜片) |
- |
kHz±20% |
|
闭/开环空载阶跃时间 |
2.5/1.5 |
ms±20% |
|
空载工作频率* |
10%行程 |
800 |
Hz±20% |
100%行程 |
60 |
||
驱动性能 |
|||
静电容量 |
5.2 |
μF±20% |
|
其它 |
|||
工作温度范围** |
-20~80 |
°C |
|
材质 |
钢 |
|
|
外形尺寸(直径×高) |
25×46 |
mm |
|
方边外形尺寸(长×宽×高) |
30×30×46 |
mm |
|
重量 |
220 |
g±5% |
|
出线长 |
1.5 |
m±10mm |
|
传感/电压连接器*** |
LEMO |
||
技术参数(P33.U4, 5mrad)
型号 |
尾缀S-闭环 |
P33.U4S |
单位 |
尾缀K-开环 |
|||
运动自由度 |
θx |
|
|
运动和定位 |
|||
标称偏转角度(0~+120V) |
5或±2.5 |
mrad±20% |
|
偏转角度(-20~+150V) |
6或±3 |
mrad±20% |
|
传感器类型 |
SGS/- |
|
|
闭/开环分辨率 |
0.25/0.1 |
µrad |
|
闭环线性度 |
0.2/- |
%F.S. |
|
闭环重复定位精度 |
0.02/- |
%F.S. |
|
机械性能 |
|||
空载谐振频率 |
3.4 |
kHz±20% |
|
加载后谐振频率(Φ25x8mm镜片) |
1.6 |
kHz±20% |
|
闭/开环空载阶跃时间 |
3/2 |
ms±20% |
|
空载工作频率* |
10%行程 |
500 |
Hz±20% |
100%行程 |
40 |
||
驱动性能 |
|||
静电容量 |
7.2 |
μF±20% |
|
其它 |
|||
工作温度范围** |
-20~80 |
°C |
|
材质 |
钢 |
|
|
外形尺寸(直径×高) |
25×55 |
mm |
|
方边外形尺寸(长×宽×高) |
30×30×55 |
mm |
|
重量 |
240 |
g±5% |
|
出线长 |
1.5 |
m±10mm |
|
传感/电压连接器*** |
LEMO |
||
技术参数(P33.U5, 6.8mrad)
型号 |
尾缀S-闭环 |
P33.U5S |
单位 |
尾缀K-开环 |
|||
运动自由度 |
θx |
|
|
运动和定位 |
|||
标称偏转角度(0~+120V) |
6.8或±3.4 |
mrad±20% |
|
偏转角度(-20~+150V) |
8.5或±4.25 |
mrad±20% |
|
传感器类型 |
SGS/- |
|
|
闭/开环分辨率 |
0.35/0.12 |
µrad |
|
闭环线性度 |
0.25/- |
%F.S. |
|
闭环重复定位精度 |
0.02/- |
%F.S. |
|
机械性能 |
|||
空载谐振频率 |
3.3 |
kHz±20% |
|
加载后谐振频率(Φ25x8mm镜片) |
- |
kHz±20% |
|
闭/开环空载阶跃时间 |
5/2.5 |
ms±20% |
|
空载工作频率* |
10%行程 |
400 |
Hz±20% |
100%行程 |
30 |
||
驱动性能 |
|||
静电容量 |
9 |
μF±20% |
|
其它 |
|||
工作温度范围** |
-20~80 |
°C |
|
材质 |
钢 |
|
|
外形尺寸(直径×高) |
25×64 |
mm |
|
方边外形尺寸(长×宽×高) |
30×30×64 |
mm |
|
重量 |
265 |
g±5% |
|
出线长 |
1.5 |
m±10mm |
|
传感/电压连接器*** |
LEMO |
||
技术参数(P33.U6, 7.5mrad)
型号 |
尾缀S-闭环 |
P33.U6S |
单位 |
尾缀K-开环 |
|||
运动自由度 |
θx |
|
|
运动和定位 |
|||
标称偏转角度(0~+120V) |
7.5或±3.75 |
mrad±20% |
|
偏转角度(-20~+150V) |
9或±4.5 |
mrad±20% |
|
传感器类型 |
SGS/- |
|
|
闭/开环分辨率 |
0.45/0.15 |
µrad |
|
闭环线性度 |
0.25/- |
%F.S. |
|
闭环重复定位精度 |
0.02/- |
%F.S. |
|
机械性能 |
|||
空载谐振频率 |
3.2 |
kHz±20% |
|
加载后谐振频率(Φ25x8mm镜片) |
1.2 |
kHz±20% |
|
闭/开环空载阶跃时间 |
6/3.5 |
ms±20% |
|
空载工作频率* |
10%行程 |
300 |
Hz±20% |
100%行程 |
25 |
||
驱动性能 |
|||
静电容量 |
11 |
μF±20% |
|
其它 |
|||
工作温度范围** |
-20~80 |
°C |
|
材质 |
钢 |
|
|
外形尺寸(直径×高) |
25×73 |
mm |
|
方边外形尺寸(长×宽×高) |
30×30×73 |
mm |
|
重量 |
290 |
g±5% |
|
出线长 |
1.5 |
m±10mm |
|
传感/电压连接器*** |
LEMO |
||
技术参数(P33.U8, 10mrad)
型号 |
尾缀S-闭环 |
P33.U8S |
单位 |
尾缀K-开环 |
|||
运动自由度 |
θx |
|
|
运动和定位 |
|||
标称偏转角度(0~+120V) |
10或±5 |
mrad±20% |
|
偏转角度(-20~+150V) |
12.5或±6.25 |
mrad±20% |
|
传感器类型 |
SGS/- |
|
|
闭/开环分辨率 |
0.5/0.2 |
µrad |
|
闭环线性度 |
0.25/- |
%F.S. |
|
闭环重复定位精度 |
0.02/- |
%F.S. |
|
机械性能 |
|||
空载谐振频率 |
3.1 |
kHz±20% |
|
加载后谐振频率(Φ25x8mm镜片) |
1 |
kHz±20% |
|
闭/开环空载阶跃时间 |
8/4 |
ms±20% |
|
空载工作频率* |
10%行程 |
150 |
Hz±20% |
100%行程 |
15 |
||
驱动性能 |
|||
静电容量 |
14.5 |
μF±20% |
|
其它 |
|||
工作温度范围** |
-20~80 |
°C |
|
材质 |
钢 |
|
|
外形尺寸(直径×高) |
25×91 |
mm |
|
方边外形尺寸(长×宽×高) |
30×30×91 |
mm |
|
重量 |
340 |
g±5% |
|
出线长 |
1.5 |
m±10mm |
|
传感/电压连接器*** |
LEMO |
||
*若此工作频率已接近或超过谐振频率,建议在小于谐振频率以下使用,若在此频率下工作,输入电压要足够小,请务必从信号逐渐调试。开环使用时可达到的工作频率大于闭环使用时工作频率。
** 可定制低温版本及高真空版本。
*** 连接器可定制。
注:以上所提参数与测试环境、测试设备有关。 运动台面平行度约20μm,粗糙度约1.6至3.2,特殊要求请在购买前与销售工程师确认。
注:以上参数是采用E00/E01系列压电控制器测得,最大驱动电压可在-20V~150V;对于高可靠的长期使用,建议驱动电压在0~120V。
频率负载曲线
尺寸图
联系我们
哈尔滨芯明天科技有限公司
总机:0451-86268790
传真:0451-86267847
邮箱:info@coremorrow.com
网址:www.coremorrow.com
地址:黑龙江省哈尔滨市南岗区学府路191号创业孵化产业园I2栋一层
| 关于我们 | 产品中心 | 产品应用 | 联系我们 |
请关注芯明天微信公众号或芯明天官网:www.coremorrow.com www.coremorrow.cn获取更多信息。

